Ein winziger Drehknopf am Steckbrett, zwei Signalleitungen, und plötzlich wird aus einer mechanischen Bewegung eine messbare Größe im Mikrocontroller. Der Rotary Encoder auswerten – Grundlagen, Software-Strategien und Praxis – klingt nach Basiswissen, ist aber in modernen Embedded-Systemen eine Kunst der Zuverlässigkeit. Wer heute ein Menü navigiert, eine Lautstärke justiert oder eine Robotikposition fein einstellt, verlässt sich auf eine stille Abstimmung aus A- und B-Phasen, Pull-Up-Pflichten und Interrupt-basierten Zählern. Die feine Grenze zwischen sauberer Signalführung und jitternden Messwerten liegt oft in einer Handvoll Millisekunden, in richtigen Pull-Ups, kurzen Kabelwegen und in der richtigen Interrupt-Konfiguration. Dieses Feature zieht eine Spur durch Hobby-Projekte bis hin zu professionellen Anwendungen, bei denen mehrere Encoder gleichzeitig arbeiten. Konkret geht es darum, wie man Drehrichtung zuverlässig interpretiert, Missverständnisse vermeidet und trotzdem flexibel bleibt – eine Balance zwischen rein manueller Auswertung und robusten Bibliotheken, die selbst hohen Drehzahlen Paroli bieten.
Grundlagen und Hardware: KY-040, Signale A/B und saubere Verkabelung
- Der KY-040 Rotary Encoder ist ein inkrementaler Drehgeber mit zwei Signalausgängen A (CLK) und B (DT), plus einem integrierten Schalter SW sowie VCC- und GND-Pins. Die Signale liefern quadraturkodierte Impulse, die eine Drehrichtungsbestimmung ermöglichen. Gleichzeitig lässt sich der Taster SW nutzen, um akustisch oder logisch auf Druck zu reagieren. Die typische Betriebsspannung liegt bei 5 V, viele Module funktionieren jedoch auch bei 3,3 V, abhängig von der konkreten Spezifikation und den verbauten Pull-Ups.
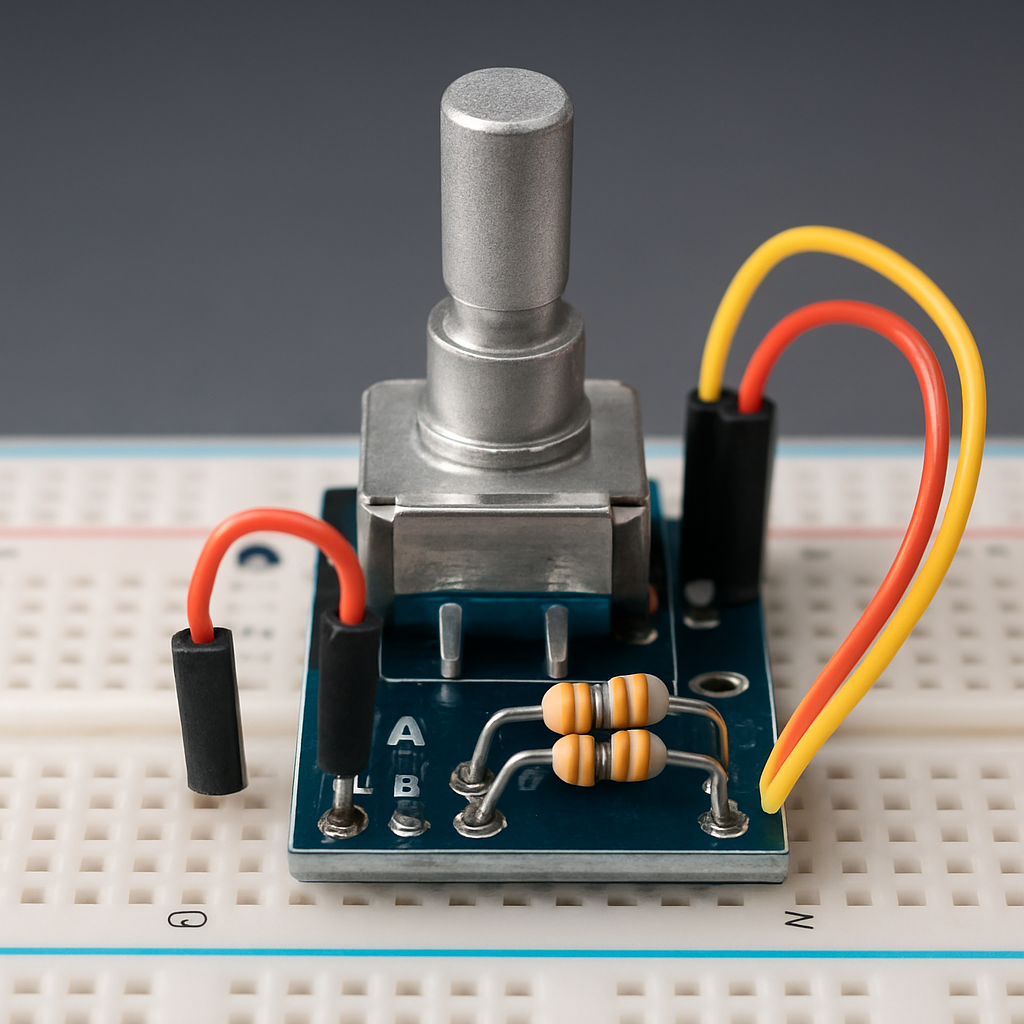
- A und B liefern zwei Rechtecksignale, deren Phasenlage zueinander verschoben ist. Die Drehrichtung ergibt sich daraus, in welcher Reihenfolge die Phasenwechsel auftreten: bei einer Umdrehung geht A dem B voraus; in Gegenrichtung geht B dem A voraus. Der Mikrocontroller wertet diese Sequenz aus, um Signaleinträge der jeweiligen Positionen zu zählen und Richtungen abzuleiten.
- Das Modul umfasst in der Regel zusätzlich einen Schalter SW, der beim Betätigen auf GND gezogen wird. Die Versorgungsspannung VCC wird direkt auf das Modul gegeben; je nach Ausführung ist 5 V Standard, teilweise auch 3,3 V zulässig. Die korrekte Zuordnung der Pins ist entscheidend, da Falschangaben zu Fehlinterpretationen der Drehrichtung führen können.
- Pull-Up-Widerstände sind wichtig, damit die Signale nicht im hochohmigen Zustand schwirren. Entweder befinden sich externe Pull-Ups am Encoder-Modul oder der Mikrocontroller aktiviert in der Software Pull-Ups, etwa durch INPUT_PULLUP. Dadurch liegen A und B stabil HIGH, solange kein Kontakt vorhanden ist, und es entstehen klare Flanken beim Wechsel. Ohne Pull-Ups steigt das Risiko von Prellungen, falschen Zählungen oder jitternden Messwerten.
- Für stabile Signale empfiehlt sich der Einsatz von Pins, die Hardware-Interrupts unterstützen. In vielen Mikrocontroller-Umgebungen werden diese Pins speziell für Encoder-Interfaces genutzt, da Interrupts eine zeitkritische Erkennung der Flankenwechsel sicherstellen. Die konkrete Auswahl der Interrupt-Pins richtet sich nach der Plattform; auf dem Arduino Uno sind es typischerweise die Pins 2 und 3, die eine Hardware-Unterstützung für Interrupts bieten.
- Die Verkabelung ist eine wesentliche Qualitätsfrage: kurze Kabel reduzieren Störsignale und Brummeinstreuungen, die zu unerwünschten Flankenwechseln führen können. Idealerweise werden CLK (A) an einen Arduino-Eingang, DT (B) an einen zweiten Eingang, GND an GND und VCC an die Versorgung geführt. Wird der Encoder nicht separat mit eigener Stromversorgung betrieben, genügt es häufig, im Setup INPUT_PULLUP zu aktivieren; externe Pull-Ups sind dann optional, aber oft hilfreich, insbesondere bei längeren Verbindungen oder in elektromagnetisch belasteten Umgebungen.
- Die Minimalkonfiguration umfasst dabei zwei Eingänge mit Pull-Ups, sofern keine separate Stromversorgung genutzt wird.
- Bei Modulen ohne eigene Stromversorgung genügt in vielen Fällen INPUT_PULLUP in der Setup-Routine des Mikrocontrollers; damit werden A und B zuverlässig in einem definierten High-Level-Zustand gehalten, solange kein Kontakt besteht. In ungünstigen Situationen oder bei längeren Leitungswegen können zusätzliche externe Pull-Ups sowie Entstörkondensatoren sinnvoll sein, um störende Impulse zu dämpfen.
- Die Wahl der Verbindungswege sollte sich an kurzen, geraden Kabeln orientieren, möglichst frei von parallelen Verbindungen zu Netzteilen oder stark wechselnden Lastleitungen. Eine klare farbliche Kodierung (z. B. Rot für VCC, Schwarz für GND, Blau und Gelb für A/B) erleichtert spätere Fehlersuchen und reduziert Verwechslungen.
- Die weit verbreitete Praxis, CLK an A und DT an B zu legen, folgt der Standardverkabelung und ermöglicht eine einfache Erstinbetriebnahme mit minimalem Aufwand. Wer SW später als Taster-Funktion verwenden möchte, kann SW-Pin ebenfalls auf einen digitalen Eingang legen und bei Bedarf mit einem internen oder externen Pull-Up anlegen.
- Ein sauberer Aufbau beinhaltet auch eine sinnvolle Platzierung des Encoders auf dem Breadboard oder in der Schaltung: Vermeide direkte Drahtbrücken zu empfindlichen Analog- oder High-Current-Pfaden; halte den Encoder mechanisch stabil, damit es nicht durch Vibration zu zusätzlichen Signalen kommt.
- Bei der Inbetriebnahme ist eine schrittweise Vorgehensweise sinnvoll: Zuerst Spannungsversorgung sicherstellen, dann A- und B-Pins auf die vorgesehenen Arduino-Pins legen, GND und VCC verbinden, anschließend INPUT_PULLUP aktivieren und schließlich erste Drehrichtungs-Tests durchführen. Erst danach SW-Funktionen programmieren oder entprellen.
- Die Praxis empfiehlt, nur die unbedingt benötigten Pins zu verwenden und andere Funktionen des Mikrocontrollers möglichst unberührt zu lassen, um Störungen zu minimieren. Die Nutzung von Hardware-Interrupts an den passenden Pins sorgt für eine robustere Reaktion auf schnelle Drehbewegungen, als es eine rein pollingbasierte Abfrage vermag.
- In der Praxis zeigt sich, dass eine kurze Startsequenz genügt: zwei Eingänge mit Pull-Ups, eine zuverlässige Stromversorgung und eine saubere Verdrahtung sind die Basis für echte Reproduzierbarkeit der Drehrichtungen, ohne dass später umfangreiche Nachjustierungen nötig werden.
Software-Ansätze: Manuelle Auswertung vs Encoder-Bibliothek
Zwei grundsätzliche Strategien helfen beim Auslesen eines Rotary Encoders am Mikrocontroller: eine einfache manuelle Auswertung ohne Bibliotheken und der Einsatz einer spezialisierten Encoder-Bibliothek. Beide Ansätze verfolgen dasselbe Ziel – Drehrichtung zu bestimmen und eine laufende Position bzw. Impulsanzahl zu erfassen – unterscheiden sich jedoch in Komplexität, Robustheit bei hohen Drehgeschwindigkeiten und im Einfluss auf die Anwendungslogik. Im Folgenden werden beide Varianten im Detail beschrieben, einschließlich typischer Setups, Loop-Logik sowie typischer Vor- und Nachteile.
Variante 1: Einfache manuelle Auswertung ohne Bibliothek
- Setup-Grundlage: Die Signale A (CLK) und B (DT) des Encoders werden als Eingänge konfiguriert, typischerweise mit Pull-Up-Widerständen über INPUT_PULLUP. Der Serial-Port dient Debug-Ausgaben (z. B. Serial.begin mit einer gängigen Baudrate). A- und B-Pins entsprechen häufig dem KY-040-Modul; Praxis ist es, A an Pin 2 und B an Pin 3 des Mikrocontrollers zu verbinden.
- A-Status und Flankenwechsel: Die Logik detektiert die fallende Flanke von A. Dazu wird der vorherige Zustand von A mit dem aktuellen verglichen; bei einer fallenden Flanke erfolgt die Auswertung der Drehrichtung.
- Drehrichtung bestimmen: Nach Erkennen einer Flanke von A wird der Zustand von B gelesen. Ist B HIGH, erhöht sich der Zähler (CW – clockwise); ist B LOW, verringert sich der Zähler (CCW – counter-clockwise). Die Richtung ergibt sich direkt aus der Phasenlage der Signale.
- Zählerführung: Der Positionszähler wird bei jeder erkannten Drehrichtungsänderung inkrementiert oder dekrementiert. Die serielle Ausgabe erfolgt typischerweise mit Serial.println, um die aktuelle Encoder-Position in Echtzeit zu verfolgen.
- Debounce- und Robustheitsaspekte: Da keine Bibliothek verwendet wird, muss die Hardware-Prellung des Schalters durch geeignete Entprellung oder zusätzliche Softwarelogik adressiert werden. Übliche Praxis ist die Verwendung von INPUT_PULLUP (Pull-Up) sowie zeitliche Filterung oder mehrstufige Flankenabfrage, um Fehlinterpretationen zu vermeiden.
- Vorteile der manuellen Lösung: Transparenz der Abläufe, keine Abhängigkeiten von externen Bibliotheken, ideales Lernwerkzeug, um Prinzipien der Quadraturkodierung und Flankenanalyse zu verstehen. Gute Grundlage für einfache, wenig ressourcenintensive Anwendungen.
- Nachteile der manuellen Lösung: Potenziell anfällig für Prellen und schnell verpasste Impulse bei hohen Drehgeschwindigkeiten, da Polling- oder einfache Flankenerkennung ohne Hardware-Interrupts erfolgt. Die Implementierung bleibt oft robust gegen einfache Tests, wird jedoch komplex, wenn mehrere Encoder gleichzeitig oder zeitkritische Sekundärfunktionen beteiligt sind.
- Typische Praxisbeispiele: Direkte Nutzung in Lernprojekten, einfachen Menünavigations- oder Justierungsaufgaben, bei denen eine klare, nachvollziehbare Auswertung wichtig ist und die Drehgeschwindigkeit moderat bleibt.
Variante 2: Encoder-Bibliothek von Paul Stoffregen
- Bibliotheksgrundlage: Die Encoder-Bibliothek kapselt die Auswertung des Drehgebers in eine abstrakte Schnittstelle, indem sie A- und B-Signale sowie deren Phasenlage interpretiert und die Position entsprechend aktualisiert.
- Initialisierung: Das Encoder-Objekt wird typischerweise wie Encoder myEnc(2, 3) erzeugt, wobei A und B als die zwei Signale des Encoders an den Mikrocontroller-Pins 2 und 3 angeschlossen sind. Die Pins können je nach Board variieren, aber 2 und 3 sind gängige hardware-Interrupt-fähige Pins.
- Setup-Logik: Im Setup wird die serielle Ausgabe initialisiert (z. B. Serial.begin mit 115200) und eine kurze Begrüßung bzw. Initialisierung ausgegeben (z. B. „Basic Encoder Test“). Die Bibliothek kümmert sich um das Monitoring der Impulse.
- Loop-Logik: Im Loop wird regelmäßig read() aufgerufen, um die aktuelle Position abzurufen. Wenn der neue Wert sich vom zuvor gemessenen Wert unterscheidet, wird der neue Wert gespeichert und über Serial.println ausgegeben.
- Vorteile der Bibliothek: Sie nutzt Hardware-Interrupts effizient, was die zeitkritische Erfassung schneller Drehungen zuverlässig macht und das Risiko verpasster Impulse deutlich reduziert. Dadurch eignet sie sich besonders gut für Anwendungen, bei denen hohe Drehzahlen oder schnelles Drehen auftreten.
- Integrationen und Ereignisse: Die Bibliothek erleichtert das Verfolgen positionsbezogener Events durch das Vergleichen alter und neuer Positionen. Diese einfache Semantik ermöglicht es, Ereignisse wie Positionssprünge oder Richtungswechsel gegenüber einer reinen Zählerlogik schnell zu erkennen.
- Praktische Auswirkungen: Durch die Abstraktion wird die Implementierung signifikant einfacher. Keine manuelle Flankenerkennung, kein direkter Umgang mit Debounce-Strategien; stattdessen eine saubere, wiederverwendbare API zum Abfragen der neuen Position.
- Vorteile der Bibliothek (Zusammenfassung):
- Nutzt Interrupts optimal aus und erfasst auch sehr schnelle Drehungen zuverlässig.
- Deutlich einfachere Implementierung, was die Entwicklungszeit verkürzt.
- Praktisch keine verpassten Impulse mehr, da die Bibliothek Eingriffe zeitnah verarbeitet.
- Nachteile der Bibliothek: Abhängigkeit von einer externen Bibliothek, was bei Build- oder Portierungsproblemen zu berücksichtigen ist; ggf. geringer direkter Einblick in die zugrunde liegende Logik im Vergleich zur manuellen Auswertung.
- Typische Anwendungsfälle: Umfangreiche Projekte wie feine Menünavigation, präzise Positionsbestimmung in Robotik-Anwendungen oder jeder Kontext, in dem Zuverlässigkeit bei hohen Drehzahlen im Vordergrund steht.
Gemeinsamer Mehrwert beider Ansätze
- Prinzip vs. Implementierung: Beide Ansätze ermöglichen eine klare Trennung zwischen der zugrunde liegenden Messlogik (Prinzip) und der konkreten Implementierung (Code-Struktur, Hardware-Setup). Dadurch bleiben Entscheidungen über Messlogik, Pin-Belegung oder Debounce oftmals unabhängig von der Wahl manueller oder bibliotheksbasierter Umsetzung.
- Reduktion der Komplexität in realen Projekten: Eine Bibliothek reduziert typischerweise den Implementierungsaufwand und vermeidet häufige Fallstricke wie Impuls-Verpasungen, Timing-Probleme oder inkonsistente Zustandsübergänge. Die manuelle Lösung bietet dagegen mehr Transparenz und ist leichter an individuelle Randfälle anpassbar.
- Lern- und Praxiswert: Der manuelle Ansatz vermittelt fundamentale Konzepte der Quadraturkodierung, Flankenlogik und Debounce-Strategien, während die Bibliothekslösung praxisnahes, robustes Verhalten bei realen Anwendungen demonstriert.
Fazit-Überblick
- Zwei klare Wege zum Ziel: Eine eigenständige, transparente Auswertung ohne Bibliothek oder eine abstrahierte, wartungsarme Lösung über eine etablierte Encoder-Bibliothek.
- Beide Varianten ermöglichen eine saubere Trennung von Prinzip und Implementierung; die Wahl hängt von Anforderungen an Robustheit, Drehgeschwindigkeit, Komplexität des Projekts und persönlicher Präferenz ab.
- Für ernsthafte Projekte mit häufigem, schnellem Drehen, mehreren Encodern oder komplexer Logik empfiehlt sich in der Regel der Einsatz der Encoder-Bibliothek, da sie Zuverlässigkeit erhöht und Entwicklungsaufwand reduziert. Für Lernzwecke, niedrigfrequente Anwendungen oder sehr spezifische Anpassungen kann die manuelle Auswertung die bessere Einsicht in das Prinzip liefern.
Hardware-Interface, Interrupts und Robustheit im Mikrocontroller-Umfeld
Grundprinzipien stabiler Abtastung
- Für stabile Abtastung sollten A- und B-Signale zuverlässig geglättet werden, um Prellen und Rauschen signifikant zu reduzieren.
- Entprellung kann softwareseitig erfolgen, etwa durch Flankenerfassung mit serieller Filterung oder das Akzeptieren von Zustandswechseln nur innerhalb definierter Zeitfenster.
- Hardware-Filter und Schmitt-Trigger sind robuste Alternativen oder Ergänzungen zur Software-Entprellung, insbesondere bei stärkerem Rauschen.
- Eine kontinuierliche, gleichmäßige Abtastung verhindert Impulslücken, besonders bei hohen Drehzahlen.
- Eine konstante Abtastrate erleichtert die Richtungserkennung, da die Reihenfolge der A- und B-Wechsel eindeutig bleibt.
- In vielen Implementierungen wird der Zähler nur bei bestimmten Flankenwechseln aktualisiert, um falsche Zählwerte zu vermeiden.
- Die Orientierung der Signale muss konsistent sein: A-Lead (A geht vor B) entspricht typischerweise CW, B-Lead kennzeichnet CCW. Abweichungen erfordern eine Logik-Anpassung oder das Vertauschen der Kanäle.
- Threadsynchronisation und Ereignis-Handling sollten so gestaltet sein, dass Verzögerungen im Hauptprogramm die Encoder-Logik nicht verzerren.
Hardware-Interrupts und Pin-Auswahl
- Auf UNO-kompatiblen Boards erfolgt die Nutzung von Hardware-Interrupts typischerweise über die Pins 2 und 3, wodurch A- und B-Signale direkt erfasst werden, ohne Polling-Verzögerungen.
- Falls andere Pins genutzt werden, stehen alternative Interrupt-Optionen zur Verfügung (z. B. Pin-Change-Interrupts oder Bibliotheken, die solche Features abstrahieren).
- Für Module ohne integrierte Pull-Ups ist der interne Pull-Up aktivierbar, was das Wiring vereinfacht und externe Widerstände reduziert.
- Externe Pull-Ups sind robust, insbesondere wenn Signale starke Störquellen tragen oder mehrere Verbraucher an einer gemeinsamen Versorgung hängen.
- Bei der Praxisverdrahtung sollten pro Signal klare Referenzen (GND) verwendet und Massenverbindungen kurz gehalten werden, um Brummschleifen zu minimieren.
- Bei mehreren Interrupt-Quellen empfiehlt sich eine klare Zuordnung, um Überschneidungen und Quetschungen von Signalen zu vermeiden.
- Interrupt-Service-Routinen (ISRs) sollten minimal gehalten werden: kurze Zeitblöcke, keine langwierigen Berechnungen, kein Serial-Output im ISR; stattdessen Flags oder volatile Variablen verwenden, die im Loop ausgewertet werden.
Pull-Ups, Pull-Downs und Polarität der Signale
- Interne Pull-Ups (INPUT_PULLUP) helfen bei Modulen ohne integrierte Pull-Ups, da Signale ansonsten in Offen-Kurzzeiten geraten könnten.
- Externe Pull-Ups bieten zusätzliche Stabilität bei längeren Leitungen und größeren Entfernungen zwischen Encoder und Mikrocontroller.
- Die Pull-Werte sollten so gewählt werden, dass klare HIGH- bzw. LOW-Logik sichergestellt ist, ohne Beeinflussung durch parasitäre Ströme.
- Die Polarität der Signale muss beachtet werden: A und B liefern quadraturartige Signale, deren Abfolge die Drehrichtung bestimmt. Unangemessene Pegelveränderungen durch zu schwache oder zu starke Pull-Ups können zu Fehlinterpretationen führen.
- Bei Umgebungslärm helfen Entstörmaßnahmen wie kurze Kabel oder gezielte Abschirmung, Störeinflüsse zu reduzieren.
- Eine gemeinsame Masseverbindung reduziert Differenzspannungen zwischen Encoder und Mikrocontroller.
Verdrahtung, Abschirmung und Störausscheidungen
- Kurze Verdrahtung reduziert Störeinflüsse; lange Kabel erhöhen die Kopplung von Störungen in die Signale.
- Langsame oder verzögerte Signale durch unzureichende Glättung können zu falschen Richtungswechseln führen, besonders bei hohen Drehzahlen oder starkem Umgebungsrauschen.
- Eine sinnvolle Layout-Praxis umfasst möglichst kurze Verbindungen, klare Trennung von Signalleitungen und saubere Versorgungslinien, um Übersprechen zu minimieren.
- In rauen Umgebungen helfen Entstörungskondensatoren (z. B. 100 nF) zwischen Signal und GND, hochfrequentes Rauschen abzuschneiden.
- Zusätzlich können Trennschichten, Abschirmungen oder Gehäuse dazu beitragen, elektromagnetische Störungen abzuhalten, insbesondere in Industrieumgebungen oder in der Nähe von Motorleitungen.
- Erdungspunkte sollten stabil und gut erreichbar sein, damit ein gemeinsames Referenzpotential vorhanden ist.
- Masse-Schleifen durch klare Stern-Topologie oder lokale Massepunkte zu vermeiden erhöht die Robustheit.
Signaleorientierung und Fehlerszenarien
- Eine korrekte Orientierung (A-B-Reihenfolge) ist wichtig; bei falscher Richtung kann man A und B vertauschen oder die Logik in der Software anpassen.
- Wenn Signale falsch interpretiert werden, prüft man zunächst die Zuordnung von CLK (A) und DT (B) und verifiziert die Phasenlage der Signale.
- Notwendige Korrekturen umfassen das Vertauschen der Kanäle oder das Umlegen der bedingten Zuweisung zur Richtungsbestimmung.
- In Fällen, in denen Prellen stark bleibt, sollte zusätzliche Hardware-Filterung (RC-Glättung, Schmitt-Trigger) oder eine robuste Debounce-Strategie eingesetzt werden.
- Bei Richtungswechseln, die sich trotz sauberer Verkabelung reproduzierbar falsch verhalten, empfiehlt es sich, ISR-Logik zu überprüfen und sicherzustellen, dass Zustandsveränderungen nicht außerhalb der erwarteten Phasen auftreten.
- Der Encoder muss nicht zwingend in einer bestimmten Position initialisiert werden; oft reicht eine stabile Startposition, gefolgt von einer robusten Erkennung der ersten Impulse.
- Falls der Encoder in sensiblen oder sicherheitsrelevanten Anwendungen eingesetzt wird, ist eine doppelte Verifizierung der Richtung durch zwei unabhängige Messpfade oder eine zusätzliche Kalibrierung sinnvoll.
Debounce-Strategien: Software-Entprellung vs Hardware-Filter
- Software-Entprellung erfasst Flankenwechsel nur nach definierten Zeitfenstern und filtert Prellen heraus.
- Hardware-Filter (RC-Glieder, Schmitt-Trigger) liefern eine stabile Pegelwahrnehmung, bevor das Signal in den Mikrocontroller gelangt.
- Eine Kombination aus beiden Ansätzen bietet oft die höchste Zuverlässigkeit, insbesondere bei Kombinationen aus Encoder und anderen Push-Buttons oder Schaltern.
- Die Wahl der Debounce-Strategie hängt von erwarteter Drehgeschwindigkeit, Umgebungsrauschen und gewünschter Reaktionszeit ab.
- In zeitkritischen Anwendungen kann ISR-gesteuerte Debounce-Logik vorteilhaft sein, solange die ISR selbst minimal gehalten wird.
- Unabhängig vom Ansatz sollten Tests unter typischen Betriebsbedingungen erfolgen, um Impulsverluste oder falsche Zählungen zu vermeiden.
Praxischeckliste für robuste Encoder-Auswertung
- Pins 2 und 3 für Hardware-Interrupts bevorzugt verwenden; bei anderen Pins alternative Interrupt-Optionen berücksichtigen.
- A- und B-Signale sinnvoll glätten und geeignete Pull-Ups wählen (intern oder extern).
- Kurze Verdrahtung, saubere Erdung und räumliche Trennung von Störquellen sicherstellen.
- Entstörungskondensatoren (z. B. 100 nF) zwischen Signal und GND einsetzen, wenn Umgebung rauschbelastet ist.
- A-B-Reihenfolge korrekt identifizieren; bei Bedarf Kanaltausch oder Logik-Anpassung durchführen.
- Debounce-Strategien klar festlegen (Software-Entprellung, Hardware-Filter oder Kombination) und in Tests verifizieren.
- ISR-Design so gestalten, dass es minimalen Zeitaufwand erfordert; Serial-Ausgaben ausschließlich außerhalb der ISR verwenden.
- Verhalten bei hohen Drehzahlen prüfen, um verpasste Impulse zu vermeiden; ggf. Bibliotheken mit robustem Interrupt-Handling einsetzen.
- Dokumentation der Verkabelung, Pull-Up-Werte, ISR-Logik und Debounce-Parameter für Wartung und Fehlersuche bereithalten.
Hinweis: Die genannten Prinzipien fassen gängige Erfahrungen zusammen und dienen der Orientierung für stabile Encoder-Auswertungen in Mikrocontroller-Umgebungen. Anpassungen je nach Encoder-Modul, Board-Variante und Einsatzumgebung sind üblich und sinnvoll.
Praxisanwendungen und Prototypen: Menünavigation, Volumensteuerung und mehr
- Die Einsatzbereiche reichen von Menünavigation bis zur Feinsteuerung von Lautstärke, Geschwindigkeit oder Position in Robotik. Ein Rotary Encoder liefert schrittweise Impulse, die zuverlässig zu einem Zählwert zusammengeführt werden und so eine intuitive Bedienung ermöglichen.
- In Display- oder OLED-Szenarien lässt sich der aktuelle Wert direkt anzeigen; der Encoder erhöht oder verringert ihn schrittweise, wodurch klare visuelle Rückmeldungen zur jeweiligen Einstellung entstehen.
- Drehgeber lassen sich gut mit Tastern kombinieren; der SW-Pin dient als zusätzlicher Menübefehl. Die Kombination aus Drehen und Drücken bietet ein kompaktes Eingabekonzept ohne weitere Bedienelemente.
- In der Motorsteuerung beeinflusst der Encoder Geschwindigkeit oder Position eines Servos oder Schrittmotors; so lassen sich feine Feinabstimmungen oder programmierte Grenzwerte realisieren.
- Bei komplexeren Projekten ermöglichen mehrere Encoder in Verbindung mit Displays eine robuste Benutzeroberfläche für interaktive Systeme. Mehrere Achsen oder Parameterbereiche lassen sich simultan navigieren, während das Display den Status präsentiert.
- Die einfache Variante dient als Lernpfad; Bibliotheken erleichtern den Einsatz in komplexeren Projekten und größeren Codebasen. Sie abstrahieren zuverlässig Interrupts, Debounce-Handling und Entprellung.
- Menünavigation mit Display: Der Encoder steuert die Cursor-Position in einer Menü-Hierarchie; Drehen verschiebt die Auswahl um eine Stufe, Drücken bestätigt eine Auswahl, und das Display zeigt den aktiven Menüpunkt sowie zugehörige Parameterwerte.
- Werteanzeige und -kalibrierung: Die aktuelle Einstellung (z. B. Lautstärke, Kontrast, Helligkeit) wird direkt als Zahl oder Prozentsatz angezeigt; der Encoder erhöht oder verringert den Zielwert in sinnvollen Sprüngen (z. B. 1 % pro Schritt).
- Schnelle Anpassung vs. Feineinstellung: Durch unterschiedliche Auflösungen beim Drehen (feine vs. grobe Schritte) lässt sich eine schnelle Erstjustage mit einer anschließenden Feineinstellung kombinieren.
- Robuste UI-Architektur: In Projekten mit mehreren Encodern lassen sich Layouts definieren, in die jeder Encoder einer bestimmten Display-Sektion zugeordnet wird (z. B. links/rechts für Parametergruppen, oben/unten für Prioritäten).
- Interaktions-Feedback: Optional lässt sich zusätzlich eine LED oder ein Display nutzen, um unmittelbar das Ergebnis einer Drehung oder eine Änderung anzuzeigen (z. B. Farbwechsel bei Überschreitung eines Schwellenwerts).
- Volumensteuerung: Der Encoder erhöht oder senkt zielgerichtet das Lautstärke-Niveau; der Wert lässt sich in Dezibel oder Prozent darstellen, mit sinnvollen Grenzwerten (z. B. 0–100 % oder -60 dB bis 0 dB).
- Gleichmäßige Sprünge: Für Audio-Anwendungen kann der Sprung pro Schritt angepasst werden, um ein angenehmes Feintuning zu ermöglichen (z. B. 1–2 % pro Schritt); bei groben Operationen kommen größere Schritte zum Einsatz.
- Timing und Reaktionsfähigkeit: Die Systemreaktion auf Encoder-Bewegungen sollte stabil bleiben – im Hinblick auf die Abtastfrequenz; Hardware-Interrupts ermöglichen eine zeitnahe Erkennung selbst bei schnellen Drehungen.
- Cross-Modal-Feedback: In einer Multimedia- oder HMI-Anwendung kann der Encoder parallel zu visuellen Signalen auch akustische oder haptische Rückmeldungen liefern (z. B. kurzes Summen bei Richtungswechsel, fühlbares Klicken pro Schritt).
- Robotik und Positionssteuerung: In Servos oder Schrittmotoren beeinflusst der Encoder Geschwindigkeit oder Zielposition; präzise Schritte ermöglichen reproduzierbare Bahnenführung, Kalibrierung und Synchronisation mehrerer Achsen.
- Schnelllade- oder Sequenzsteuerung: Encoder-Werte dienen als Feedback in Regelkreisen oder bei der synchronen Ablaufführung von Bewegungen, wodurch Sequenzen zuverlässig ablaufen.
- Mehrfach-Encoder-Szenarien: In komplexeren Systemen ermöglichen mehrere Encoder, Displays und Bedienelemente eine robuste, modulare Benutzeroberfläche; jeder Encoder steuert eine eigene Parametergruppe, während das Display den Gesamtstatus widerspiegelt.
- Lernpfad und Bibliotheken: Die einfache Variante unterstützt pragmatisches Lernen der Grundprinzipien – Phasenverschiebung der Signale, Richtungserkennung und Zählen. Bibliotheken erleichtern die Implementierung in größeren Projekten, erhöhen Zuverlässigkeit bei hohen Drehzahlen und verringern Wartungsaufwand durch konsistente Schnittstellen.
- Typische Bibliotheken und Ansätze: Eine Encoder-Bibliothek ermöglicht das direkte Auslesen der Position mit Interrupt-Unterstützung, erkennt schnelle Drehungen zuverlässig und erleichtert die Integration mit Displays, Buttons und anderer Peripherie-Komponenten.
- Hardware-Umfeld: Üblicherweise werden zwei Signale A und B verwendet, mit Pull-Ups gegen HIGH, um stabile Abtastwerte zu garantieren; der SW-Pin kann in späteren Projekten als zusätzliche Tastschalter-Funktion genutzt werden.
- Signalqualität und Störunempfindlichkeit: Kurze Leitungen und Hardware-Pull-Ups vermindern Störsignale; Debounce-Strategien reduzieren Prellen; bei komplexen Installationen kann ein Kondensator von Signal zu Masse (GND) helfen.
- Prototyp-Architektur – Beispielaufbau: Ein Encoder-Modul (A/B) verbindet sich mit einem Mikrocontroller, der ein Display ansteuert und einen Taster über den SW-Pin abfragt. Interrupts erfassen Drehrichtung und Schrittweite effizient; das Display aktualisiert die Werte in Echtzeit.
- Prototyp-Architektur – Beispielpfad (Kurz): Encoder-Impulse liefern Richtungsinformationen; der Zählerwert wird auf dem Display gespiegelt; Tasterklick bestätigt Menü-Optionen; bei Lautstärkeregelung wird der Wert unmittelbar auf dem Panel sichtbar gemacht.
- Prototyp-Architektur – Skalierbarkeit: Mehrere Encoder können unabhängig oder gemeinsam einer zentralen Menüführung zugeordnet werden; zusätzlich lassen sich einfache Bibliotheken nutzen, die das Handling von Interrupts, Debounce und Display-Updates kapseln.
- Fazit für Praxisanwendungen: Der Rotary Encoder bietet ein kompaktes, gezieltes Eingabemittel, das sich flexibel in Menüs, Audio- oder Robotik-Funktionen integrieren lässt; als Lernwerkzeug dient er der Verinnerlichung von Signalverarbeitung und Interface-Logik, während Bibliotheken eine robuste Grundlage für komplexere Systeme liefern.
Troubleshooting, Optimierungen und fortgeschrittene Konzepte
Typische Probleme
- Falsche Drehrichtung aufgrund falscher A/B-Zuordnung; Gegenmaßnahme: Pin-Belegung prüfen oder Logik anpassen, damit CW- und CCW-Richtungen konsistent erkannt werden, selbst wenn Encoder-Module A/B vertauscht sind.
- Werte springen oder inkonsistente Zählerwerte: Gegenmaßnahmen umfassen sorgfältige Verkabelung, Reduzierung von Störsignalen, sinnvolles Setzen von Debounce-Werten (Software-Debounce) und gegebenenfalls temporäres Sperren bei Signalwechseln, um Überschneidungen zu vermeiden.
- Probleme mit der Ausgabe im Serial Monitor: Die Baudrate muss korrekt auf 115200 gesetzt sein. Prüfen Sie Kabel- und USB-Qualität sowie gute Erdung, da schlechte Verbindungen zu unterbrochenen oder unsteten Übertragungen führen können.
- Prellen stört weiterhin: Erhöhe den Debounce-Wert schrittweise oder füge Hardware-Entprellkondensatoren hinzu, um Kontaktprellen mechanisch zu dämpfen; starte mit 10–100 nF je nach Belastung durch die Umgebung.
- Sehr schnelle Drehungen: Der Bibliotheksansatz erweist sich oft als robuster als eine rein manuelle Implementierung, da Bibliotheken Hardware-Interrupts effizienter nutzen und Impulse auch bei hoher Frequenz zuverlässig erfassen.
- Umstellung auf andere Mikrocontroller-Plattformen: Interrupt-Logik muss an die Architektur angepasst werden, z. B. andere Interrupt-Pin-IDs, unterschiedliche Logik-Levels oder andere Interrupt-Handling-Mechanismen; Portierung erfordert oft Anpassungen in der Pin-Belegung und ISR-Struktur.
- Umgehung von Problemen: Durch Vertauschen von A/B oder durch Wechsel zu SSI/anderen Schnittstellen (falls verfügbar) lassen sich klare Unstimmigkeiten umgehen; solche Umgehungen sollten jedoch sorgfältig getestet und dokumentiert werden, um langfristige Wartbarkeit sicherzustellen.
Optimierungen
- Debounce-Strategien optimieren: Software-Debounce-Werte so wählen, dass echtes Drehen zuverlässig erkannt wird, ohne Impulse zu verlieren; praktikabel sind Werte von wenigen Zyklen bis zu einigen Dutzend Millisekunden.
- Hardware-Entprellung ergänzen: Hardware-Entprellkondensatoren (typisch 100 nF) zwischen Signal und GND reduzieren Prellen deutlich und verbessern die Stabilität bei langen Verlegewegen oder in der Nähe von Motoren.
- Verkabelung optimieren: Kurze, geschirmte oder gut verdrillte Verbindungen sowie gemeinsame Masse reduzieren Störsignale; Pull-Ups (intern oder extern) stabilisieren Idle-Levels und erleichtern saubere Flanken.
- Störquellen minimieren: Separates Netzteil für Encoder-Module oder zumindest eine klare Trennung von Analog-/Digital-Schaltungspuren; regelmäßiges Schirmungs- und Erdungsmuster hilft in lärmbelasteten Umgebungen.
- Software- und Bibliotheks-Optionen abwägen: Für bewegte oder hochdynamische Anwendungen empfiehlt sich der Einsatz einer Encoder-Bibliothek, die Interrupts effizient nutzt und schnelle Impulse zuverlässig abbildet; bei einfachen Anwendungen genügt oft eine eigenständige Schleifen-basierte Auswertung, birgt aber ein erhöhtes Risiko bei hohen Drehzahlen.
- Pull-Ups sicherstellen: Falls das Encoder-Modul keine stabilen Pull-Ups liefert, sollten integrierte Pull-Ups via Code (INPUT_PULLUP) oder externe Pull-Up-Widerstände gesetzt werden; stabile High-Zustände verhindern falsche Flanken.
- Interrupt-Design optimieren: Wenn mehrere Encoder-Kanäle verwendet werden oder Interrupt-Handler komplex werden, separate volatile Variablen mit minimalem ISR-Code verwenden; lange Verarbeitung in der ISR vermeiden und per Flags außerhalb der ISR weiterarbeiten.
- Test- und Debug-Strategien: Systematisches Testen mit definierten Referenz-Drehungen, schrittweises Erhöhen der Drehgeschwindigkeit und ständiges Logging von A/B-Alternationen erleichtern die Lokalisierung von Problemen.
- Portabilität berücksichtigen: Bei Plattformwechseln auf andere Mikrocontroller-Familien Pin-IDs, Interrupt-Typen (z. B. extern vs intern) und -Verfügbarkeiten prüfen; ggf. Abstraktionslayer verwenden, um Portierung zu vereinfachen.
Fortgeschrittene Konzepte
- Bibliotheksbasierte Ansätze bevorzugen bei hohen Drehgeschwindigkeiten: Bibliotheken nutzen Hardware-Interrupts, liefern konsistente Richtungsbestimmung und verringern das Risiko verpasster Impulse gegenüber reiner manueller Implementierung.
- SSI- oder alternative Schnittstellen als Alternative: Falls vorhanden, kann eine serielle SSI-Schnittstelle stabile Winkelwerte auch bei erhöhtem Rauschen liefern und die Abhängigkeit von Tast-/Prellsignalen bzw. zeitkritischen Abtastfenstern verringern.
- Interrupt-Architektur über Plattformgrenzen hinweg: Für Systeme mit vielen Achsen oder komplexeren Eingaben kann ein gemeinsamer Interrupt-Dispatcher sinnvoll sein, der mehrere Pins überwacht und die Verarbeitung in den Hauptloop entlastet; so lassen sich effizientere Wechsel zwischen Aufgaben erreichen.
- Timing- und Kalibrierungstaktiken: Debounce-Parameter sollten in Abhängigkeit von Temperatur, Alterung der Kontakte und Verkabelung angepasst werden; Kalibrier-Reports helfen, Trajektorien und Drift über Zeit zu erkennen und gegenzusteuern.
- Signal-Conditioning im Frontend: Gezielte Filterschritte oder Rauschunterdrückung am Eingang (z. B. einfache RC-Filter oder Ferritkämme) verbessern die Robustheit gegen induzierte Störungen aus Motornähe oder Langstreckenverkabelung.
- Fehlersichtbarkeit und Diagnostik: Fortgeschrittene Diagnostik umfasst regelmäßige Checks (Flankenabstände, Quasi-Null-Impulse, Richtungswechsel-Consistency); serielles Logging oder ein kleines Debug-UI im Mikrocontroller-Programm erleichtern die Wartung.
- Plattformspezifische Optimierungen: Bei neuen Architekturen kann es sinnvoll sein, abstrakte Treiberklassen zu verwenden, die Pin-IDs als Parametereingaben akzeptieren und so eine einfache Portierung ermöglichen; dokumentierte Konventionen sichern zukünftige Erweiterungen.
Hinweis: Die hier beschriebenen Ansätze basieren auf typischen Erfahrungen mit KY-040/Rotary-Encoder-Modulen; konkrete Implementierungsempfehlungen können je nach verwendetem Mikrocontroller, Compiler-Toolchain und Encoder-Modul variieren.
Fazit
Am Ende zählt nicht die Komplexität der Theorie, sondern die Zuverlässigkeit der Auswertung in der Praxis. Wer sich entscheidet, manuell zu zählen, gewinnt Transparenz über jeden Flankenwechsel, Debounce-Logik und Richtungsbestimmung – und versteht, wie Quadraturkodierung wirklich funktioniert. Wer stattdessen eine Bibliothek nutzt, profitiert von konsistentem Interrupt-Handling, robuster Timing-Assistenz und einer klaren API, die mehrere Encoder zuverlässig synchronisiert. Hardwareseitig bedeuten Pull-Ups, kurze Leitungen und eine stabile Masse die Grundlage; Software-seitig entscheidet die richtige ISR-Struktur über Reaktionszeiten. Ganz gleich, ob es ein KY-040-Modul oder ein anderes Encoder-Modul ist: Die Signale A und B müssen eindeutig getaktet und die Drehrichtung konsistent interpretiert werden, sonst verliert man schnell Übersicht und Vertrauen in das Messergebnis.
Für den Übergang vom Lernprojekt zur Praxisanwendung empfiehlt sich eine klare Portabilität: Beginnen Sie simpel mit zwei Pull-Ups, kurzen Verbindungen und stabiler Versorgung, prüfen Sie Drehrichtung und Reaktion bei schnellen Bewegungen, und dokumentieren Sie Pinbelegung sowie Parameter. Später lässt sich eine Encoder-Bibliothek einsetzen, um Wartbarkeit zu erhöhen und mehrere Achsen gleichzeitig zu beherrschen. Das übergeordnete Ziel bleibt dieselbe Bedienbarkeit von Menüs, Lautstärke oder Roboterposition – zuverlässig, reproduzierbar und nachvollziehbar, egal ob die Lösung als manueller Ansatz oder als Bibliotheksimplementierung umgesetzt wird.