In Zeiten wachsenden DIY- und Open-Source-Projekten ist eine klare, praxisnahe Einführung in Segmentanzeigen relevanter denn je. Dieser Beitrag verbindet Mikrocontroller-Programmierung, Bash- und Linux-Automatisierung, Löttechnik und 3D-Druck, damit Leser konkrete, umsetzbare Projekte realisieren können — vom einfachen Zähler bis zu komplexeren Anzeige-Interfaces. Captain Malu möchte Anfängern das Selbstbauen erleichtern: klare Schritte, Bauteile, Schaltungen und fertige Gehäuse-Ideen, die sofort funktionieren. Hinweis: Die hier beschriebenen Konzepte beruhen auf etablierten Prinzipien von 7-Segmentanzeigen, Treibern und offenen Standards, die in vielen DIY-Projekten Anwendung finden. 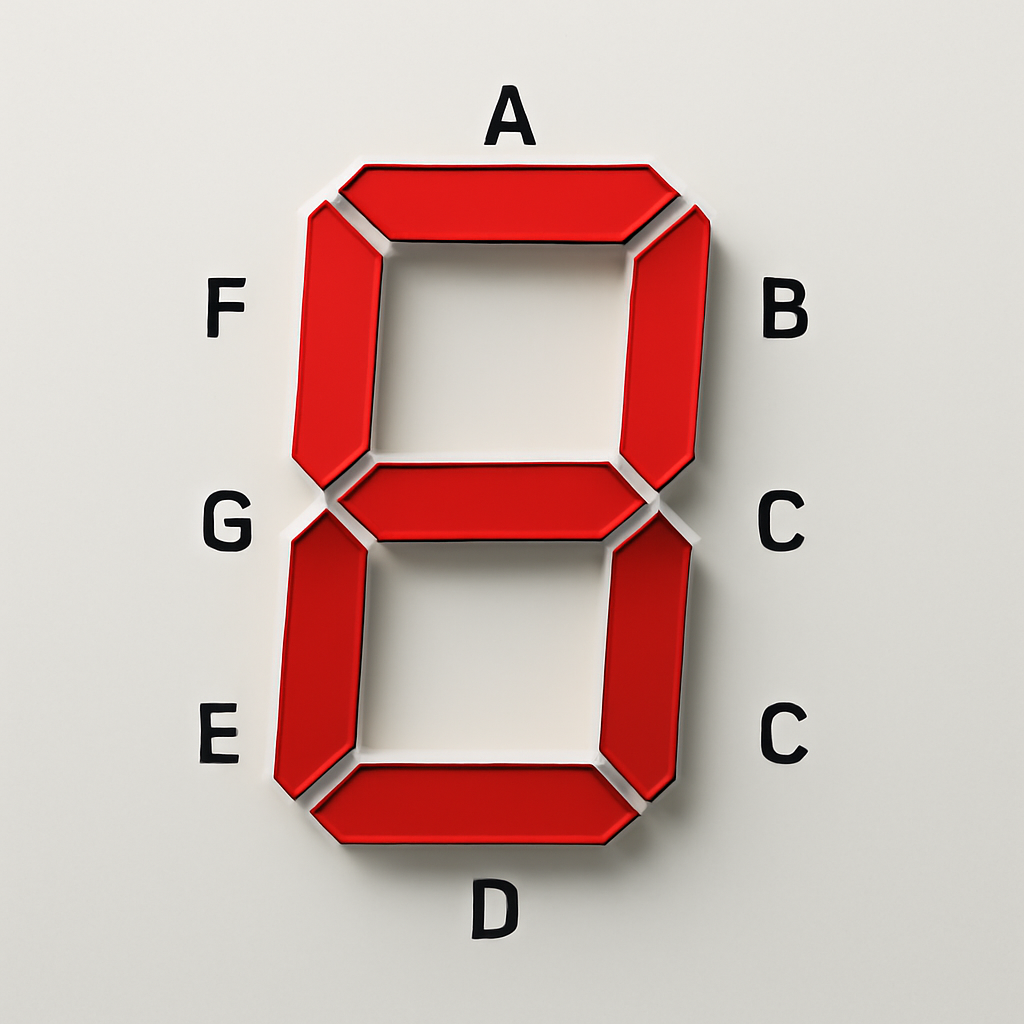 Diagramm einer 7-Segmentanzeige mit A-G Segments
Diagramm einer 7-Segmentanzeige mit A-G Segments
7-Segmentanzeigen verstehen: Typen, Aufbau und typische Ansteuerungen
Eine 7-Segmentanzeige ist eine kompakte Anzeigeeinheit, die sieben LEDs in Form einer Acht enthält, ergänzt durch einen Dezimalpunkt. Praktisch bedeutet das: Je nach Bauart muss der gemeinsame Anschluss entweder als Anode oder als Kathode geführt werden, damit sich die sieben Segmente unabhängig ansteuern lassen. So lassen sich Ziffern von 0 bis 9 sowie einfache Buchstabenkombinationen darstellen. In der Praxis begegnen Bastler zwei Grundtypen: gemeinsame Anode und gemeinsame Kathode. Der Unterschied liegt im Anschluss an die LEDs – der Rest bleibt gleich.
Die Ansteuerung erfolgt durch das gezielte Ein- oder Ausschalten der sieben Segmente. Um mehrere Ziffern effizient zu steuern, kommt Multiplexing zum Einsatz: Man schaltet nacheinander die Ziffern, die Segmente bleiben dabei konstant. Der Augenblick der Darstellung wird so kurz gewählt, dass der Eindruck einer durchgehenden Anzeige entsteht. Multiplexing senkt den Pin-Verbrauch und reduziert den Schaltungsaufwand, erfordert aber zeitliche Koordination und saubere Lötverbindungen.
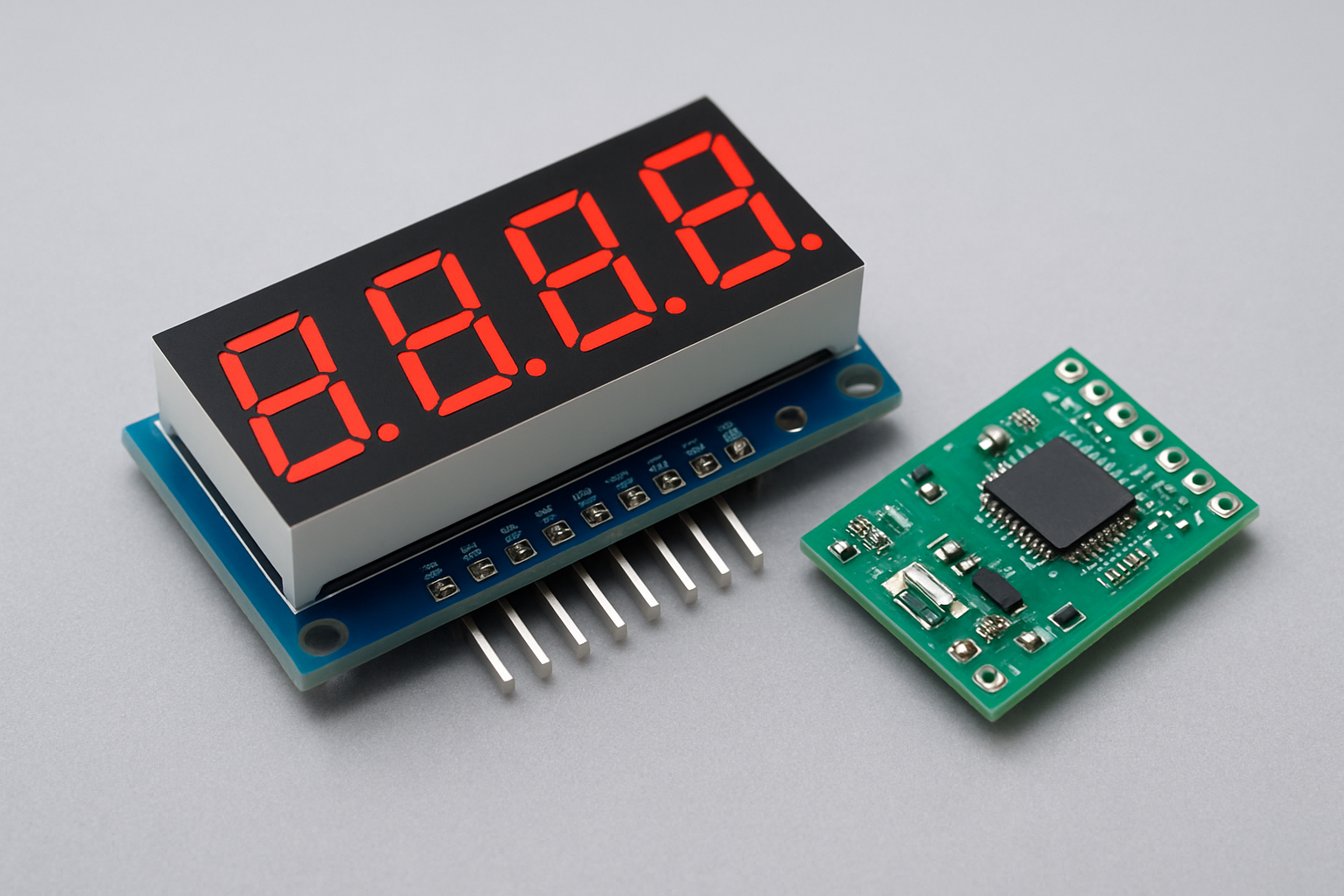
Eine 4-stellige 7-Segment-Anzeige kommt häufig mit integrierten Treibern daher. Solche Module ermöglichen es, die Ziffern über wenige Pins zu steuern, während der Treiber die Segmente intern aufbereitet. Typische Module arbeiten mit gemeinsamen Anschlüssen und benötigen lediglich die Segmentleitungen A bis G plus DP (Dezimalpunkt).
Die Gehäusekonstruktion sollte so ausgelegt sein, dass die Sichtbarkeit der Segmente auch bei erhöhter Umgebungshelligkeit erhalten bleibt. Ein gut belichteter Displaybereich ist entscheidend für die Leserlichkeit in Werkstattraum- oder Kühllagerumgebungen. Die Wahl des Displays hängt stark vom Projekt ab: Für einfache Zähler reicht oft ein einzelnes 4-stelliges Modul, während komplexere Interfaces mehrere Ziffern plus Statusanzeigen erfordern. 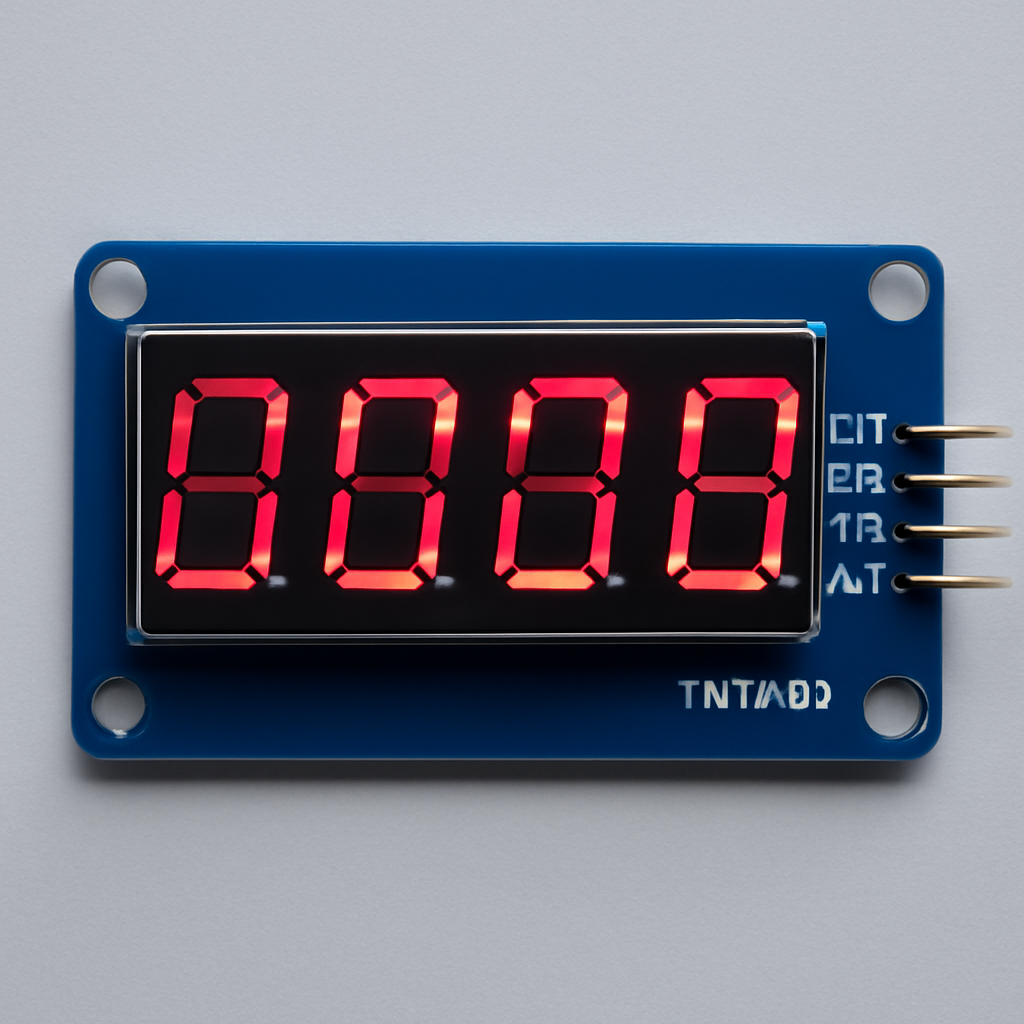 4-stelliges TM1637 Modul: Frontansicht
4-stelliges TM1637 Modul: Frontansicht
In vielen Tutorials wird erläutert, wie eine einzelne 7-Segmentanzeige aufgebaut ist. Die Bauform besteht aus sieben LEDs plus Dezimalpunkt, wobei gemeinsame Ansteuerung und gemeinsame Anschlüsse eine effiziente Verdrahtung ermöglichen. Die Grundschaltungen zeigen, wie man die Segmente direkt über die Ausgänge eines Mikrocontrollers oder über einen Treiber schaltet – mit Vorwiderständen für jeden LED-Strompfad. Für Anfänger lohnt sich ein erstes Übungsprojekt: eine einfache Zähler-Schaltung, die von 0 bis 9 durchläuft und dabei den Dezimalpunkt periodisch aktiviert.
Achte darauf, dass du auf die richtige Polarität achtest: Gemeinsame Anode bedeutet, dass das positive Potential am gemeinsamen Anschluss liegt und die Segmente durch sinking des Pins am Mikrocontroller eingeschaltet werden. Bei gemeinsamer Kathode kehrt sich die Logik um. Eine kreative Lösung ist der Einsatz von einfachen Vorwiderständen, die jeden Segmentpfad schützen und eine gleichmäßige Ausleuchtung sicherstellen. 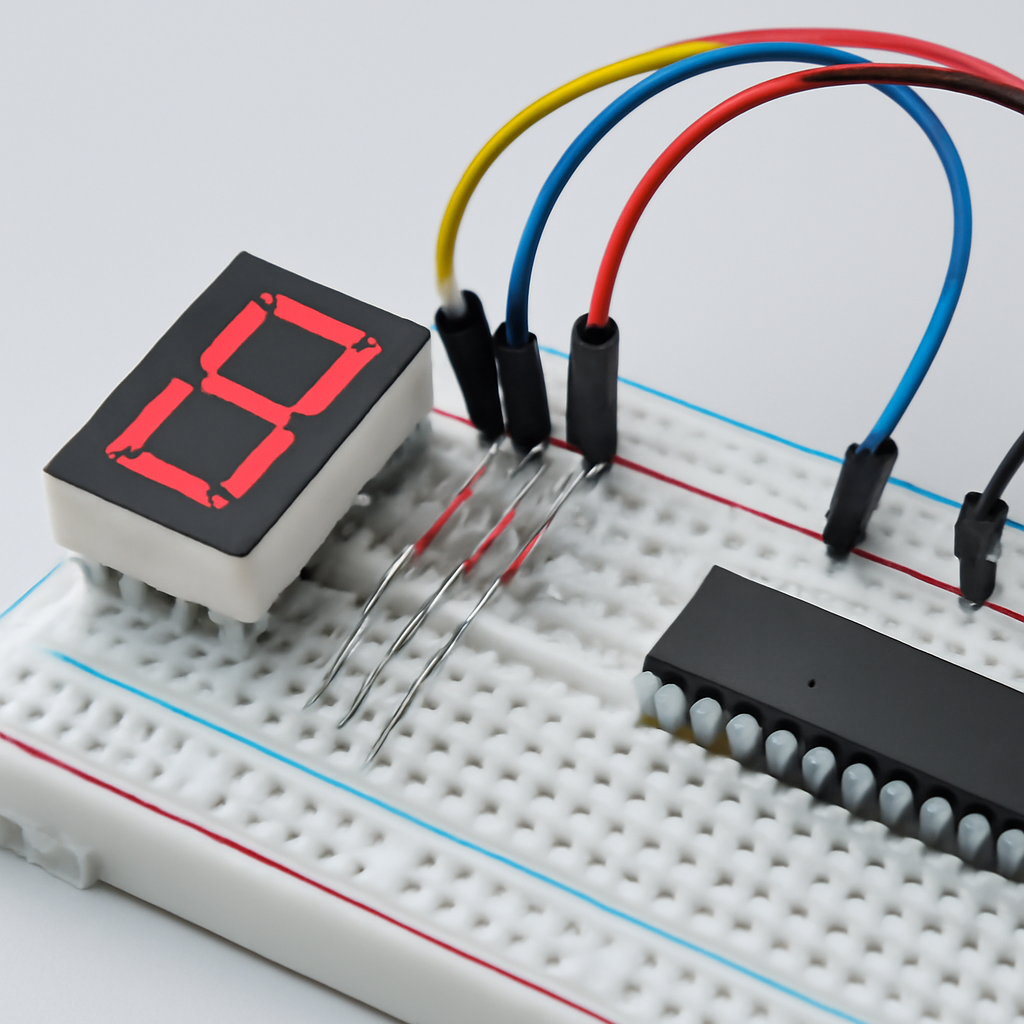 Beispielschaltung einer 7-Segmentanzeige mit Vorwiderständen
Beispielschaltung einer 7-Segmentanzeige mit Vorwiderständen
Mikrocontroller-Strategien: Direktsteuerung vs. Treiber-Module
Bei der Entscheidung, wie eine 7-Segmentanzeige angesteuert wird, stehen zwei grundsätzliche Strategien gegenüber: Direkte Ansteuerung durch den Mikrocontroller oder der Einsatz von Treiber-Modulen bzw. Treiber-ICs. Beide Ansätze haben Vor- und Nachteile, die sich je nach Projektgröße, Pin-Verfügbarkeit und gewünschter Komplexität unterscheiden.
Bei der direkten Steuerung gilt: Jeder Segmentpin wird von einem GPIO-Pin des Mikrocontrollers gesteuert. Je nach Anzahl der Ziffern steigt damit der Pin-Bedarf. Die Vorteile liegen in der Einfachheit und dem geringen Bauteilaufwand, besonders bei kleinen Displays. Nachteile sind der hohe Pin-Bedarf und die potenzielle Belastung des Mikrocontrollers, insbesondere wenn gleichzeitig weitere Sensoren oder Peripherie bedient werden.
Treiber-Module erhöhen die Skalierbarkeit deutlich. Sie übernehmen die Multiplexing-Aufgabe, bündeln Segmente in Treiber-Schichten und ermöglichen es, mit wenigen Pins mehrere Ziffern zu steuern. Vorteile sind geringerer Pin-Verbrauch, bessere Gleichmäßigkeit der Helligkeit und oft zusätzliche Features wie integrierte Dezimalpunkte, Blinken oder einfache Ansteuerungsprotokolle. Nachteile sind zusätzlicher Bauteilaufwand, potenziell höhere Latenzen und die Notwendigkeit, sich mit Protokollen auseinanderzusetzen.
Für Maker mit Linux-Umgebungen steht die Wahl oft im Zusammenhang mit verfügbaren Bibliotheken und Treibern. Überlege dir, welches Framework oder welche Sprache du bevorzugst, dann passe die Hardware-Auswahl entsprechend an. Wer auf Linux-Administrationen setzt, wird sich leichter tun, Treiber-Module auf dem Host-System zu nutzen und per Bash oder Python komfortabel zu steuern. Wichtige Praxisregel: Lege zuerst fest, ob du mehrere Ziffern oder nur eine einfache Zählanzeige planst, bevor du in ein Treiber-Modul investierst. 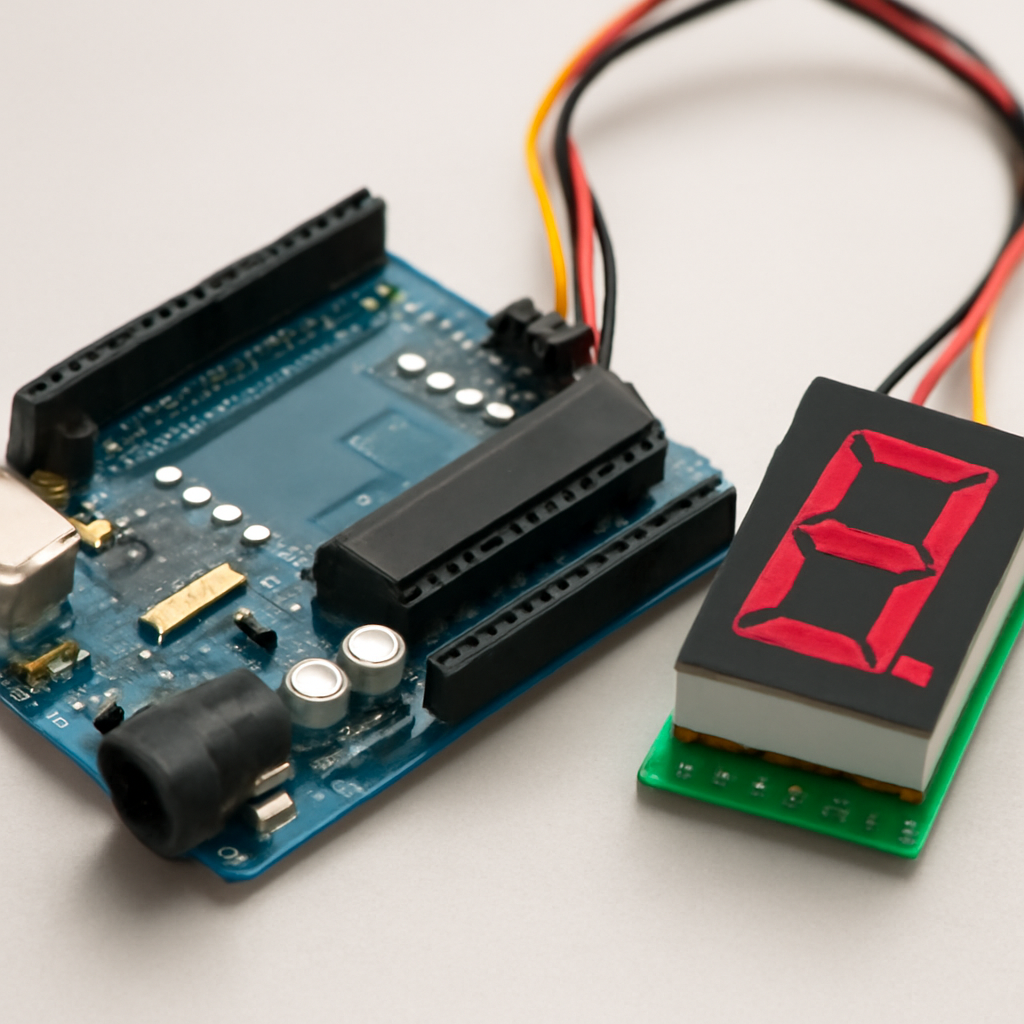 Mikrocontroller-Board neben Grafik-Display
Mikrocontroller-Board neben Grafik-Display
Für Captain Malu bedeutet das: Starte mit der direkten Ansteuerung einer einzelnen Ziffer, um das Grundprinzip zu verstehen. Danach kannst du auf ein TM1637- oder HT16K33-basiertes Modul wechseln, wenn du mehr Ziffern oder eine zentrale Steuerlogik brauchst. Das spart Zeit und ermöglicht, die Konzepte in einem realistischen Rahmen zu erproben. Hinweis: Je nach Board und Treiber kann die Programmierung variieren, daher empfiehlt sich eine schrittweise Annäherung mit kleinen Tests. Klipper auf Linux-DIY-Druckern (Captain Malu)
TM1637, HT16K33 und Co.: Wann welche Lösung sinnvoll ist
Der TM1637 ist ein kompakter, vierstelliger Treiber, der oft in Modulen mit integrierter Schaltung zu finden ist. Er kommuniziert über einen einfachen Zwei-Draht-Bus, der die Segmente steuert, während die Ziffern per Multiplexing genutzt werden. Die Vorteile liegen in der einfachen Integration, dem geringen Platzbedarf und der unkomplizierten Programmierung. Für Projekte, die nur wenige Ziffern benötigen oder bei denen Platz eine kritische Komponente ist, ist der TM1637 eine hervorragende Wahl.
HT16K33 ist ein leistungsfähiger LED-Treiber mit I2C-Schnittstelle, der typischerweise mehrere Ziffern oder Matrix-Displays effizient steuern kann. Er eignet sich besonders gut für Displays mit vielen Segmenten oder wenn eine zentrale Logik nötig ist, um komplexere Anzeigen zu realisieren. Der HT16K33 erlaubt oft das Ansteuern größerer LED-Flächen, einschließlich LED-Arrays und mehrstelliger Konstellationen, ohne dass einzelne Pins pro Segment belegt werden müssen.
Weitere Lösungen in diesem Bereich umfassen Treiber wie MAX7219 oder spezialisierte LED-Arrays, die ähnliche Prinzipien nutzen, jedoch unterschiedliche Protokolle und Anleitungen erfordern. Die Wahl hängt stark davon ab, wie viele Ziffern du brauchst, welche Schnittstelle du bevorzugst (I2C vs. SPI/Two-Wire) und wie komplex die Anzeigen-Funktionalität sein soll. Für einfache Zählanzeigen reicht oft TM1637 aus; für ausgefeilte Uhr- oder Messanzeigen ist HT16K33 häufig die robustere Wahl.
Ein häufiger Praxisfehler ist die Vermischung von Treiber-Protokollen oder das Übersehen gemeinsamer Anschlüsse. Prüfe daher immer, ob dein Display-Modul wirklich als gemeinsames Anoden- oder Kathoden-Design arbeitet, bevor du den Treiber wählst. 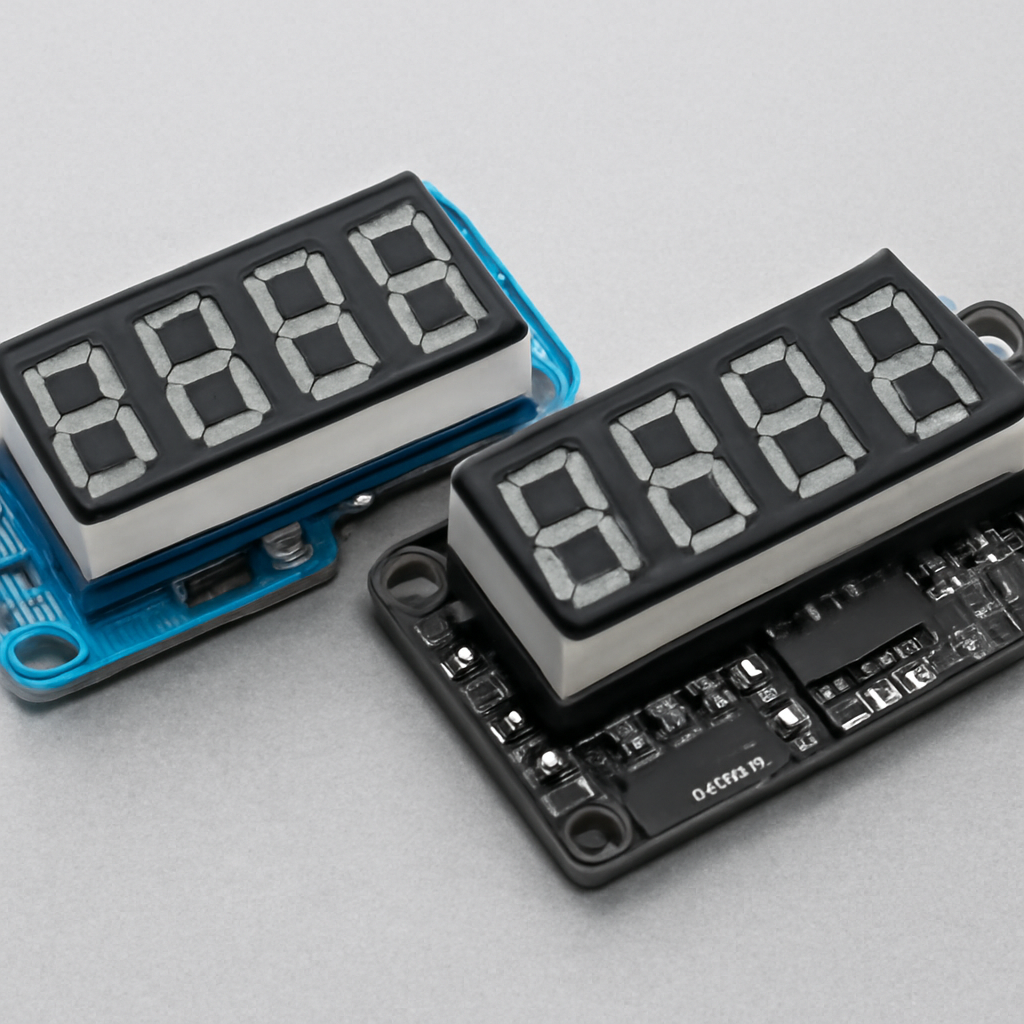 TM1637 Modul vs HT16K33 Board
TM1637 Modul vs HT16K33 Board
Konkrete Anwendungstipps: Für ein leichtgewichtiges Projekt empfiehlt sich der Einsatz eines TM1637-Moduls mit einer einzelnen Ziffernfolge, das sich einfach in ein Bash- oder Python-Skript über eine serielle API integrieren lässt. Für komplexere Dashboards, die mehrere Ziffern, Textanzeigen oder LED-Mechanismen benötigen, ist HT16K33 in der Regel die bessere Wahl. Die Entscheidung hängt davon ab, wie dynamisch die Anzeige sein soll und wie viel Rechenleistung die Begleitlogik benötigt. Beispiel-Workflows: Ein kleines Python-Skript nutzt I2C, um HT16K33 zu initialisieren und fortlaufend den Inhalt des Displays zu aktualisieren. Mit TM1637 lässt sich derselbe Effekt mit weniger Code erreichen, aber auf Kosten der Skalierbarkeit. 3D-Druck-Trends 2026
Für Captain Malu empfiehlt sich ein zweistufiger Plan: Starte mit TM1637, sammle Erfahrungen mit dem Basisbetrieb, dann wechsle zu HT16K33, falls du merkst, dass du mehr Ziffern oder komplexe Anzeigen benötigst. Die Lernkurve ist moderat und die beiden Optionen ergänzen sich gut, insbesondere in Projekten, die in Linux-Umgebungen laufen. 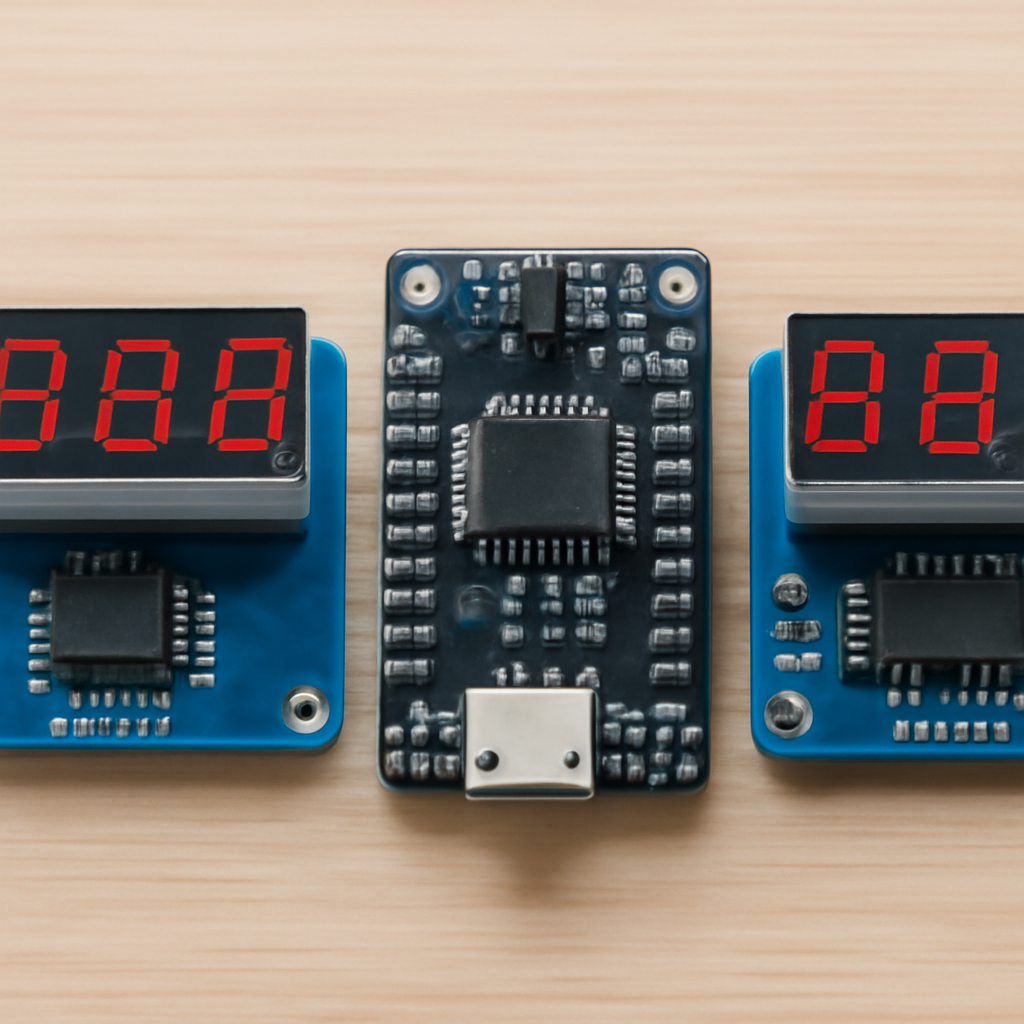 Vergleich TM1637 vs HT16K33
Vergleich TM1637 vs HT16K33
Linux und GPIO: Zugriff auf Segmente mit Bash, Python und libgpiod
Linux-basierte Systeme bieten leistungsstarke Möglichkeiten, 7-Segmentanzeigen zu steuern. Der einfache Einstieg erfolgt oft über Bash-Skripte, um GPIO-Pins zu setzen oder zu löschen. Moderne Ansätze nutzen libgpiod, eine Bibliothek, die GPIOs als Streams abstrahiert und in Programmiersprachen wie Python genutzt werden kann. Mit libgpiod lassen sich Segmente gezielt ansteuern, Taktfrequenz und Timing präzise steuern und komplexe Displays in weniger Code realisieren.
Der Einstieg erfolgt typischerweise mit der Identifikation der relevanten GPIO-Pin-Nummern, dem Öffnen der Kontrollpfade und dem Schreiben der gewünschten Logik. Bei der Steuerung mehrerer Ziffern muss oft ein Multiplexing-Schema implementiert werden, das die aktiven Ziffern zeitlich sequenziell aktiviert und die jeweiligen Segmente entsprechend setzt. In Bash lässt sich dies als Schleife realisieren; in Python erleichtert eine Bibliothek die Zuordnung zwischen Segmenten und Ziffern.
Wichtige Praxishinweise: Prüfe vor dem Ansteuern der Pins die Stromlast der LEDs, nutze Vorwiderstände pro Segment, und achte darauf, dass die gemeinsamen Anschlüsse sauber gelötet sind. Verwende ein robustes Netzteil, das Spannungsschwankungen abfedert, um eine konstante Helligkeit zu gewährleisten. Für komplexe Automatisierungsszenarien kannst du Bash-Skripte mit Cron-Jobs kombinieren oder Python-Skripte in regelmäßigen Abständen ausführen. Tipps: Halte deine GPIO-Logik eindeutig, benutze definierte Konstanten für Pin-Nummern und dokumentiere jeden Schritt. Klipper auf Linux-basierten DIY-Druckern: Praxisnahe Installations- und Kalibrierungsanleitung für Captain Malu
Beispiele aus der Praxis: Ein Raspberry Pi oder ähnliche SBC-Boards bieten sich an, um die Anzeige in ein vorhandenes Linux-Ökosystem zu integrieren. Wenn du Bash bevorzugst, erstelle eine Funktion, die die aktuellen Werte in ein Display schreibt. Wenn Python dein Favorit ist, nutze eine Klasse, die die GPIO-Zuordnungen kapselt und das Timing-Management übernimmt. Wichtig ist, dass du Tests schreibst, die Helligkeit, Dezimalpunkt und Fehlerresistenz prüfen.
Ein typischer Fehlerfall ist eine falsche Startsequenz, bei der der Treiber initialisiert wird, danach aber die Segmente nicht zuverlässig aktualisiert werden. Ein weiteres häufiges Problem sind Lötfehler an den gemeinsamen Anschlüssen, die zu unscharfem oder gar nicht sichtbarem Licht führen. Prüfe deshalb jede Verbindung, bevor du das System in den laufenden Betrieb nimmst. 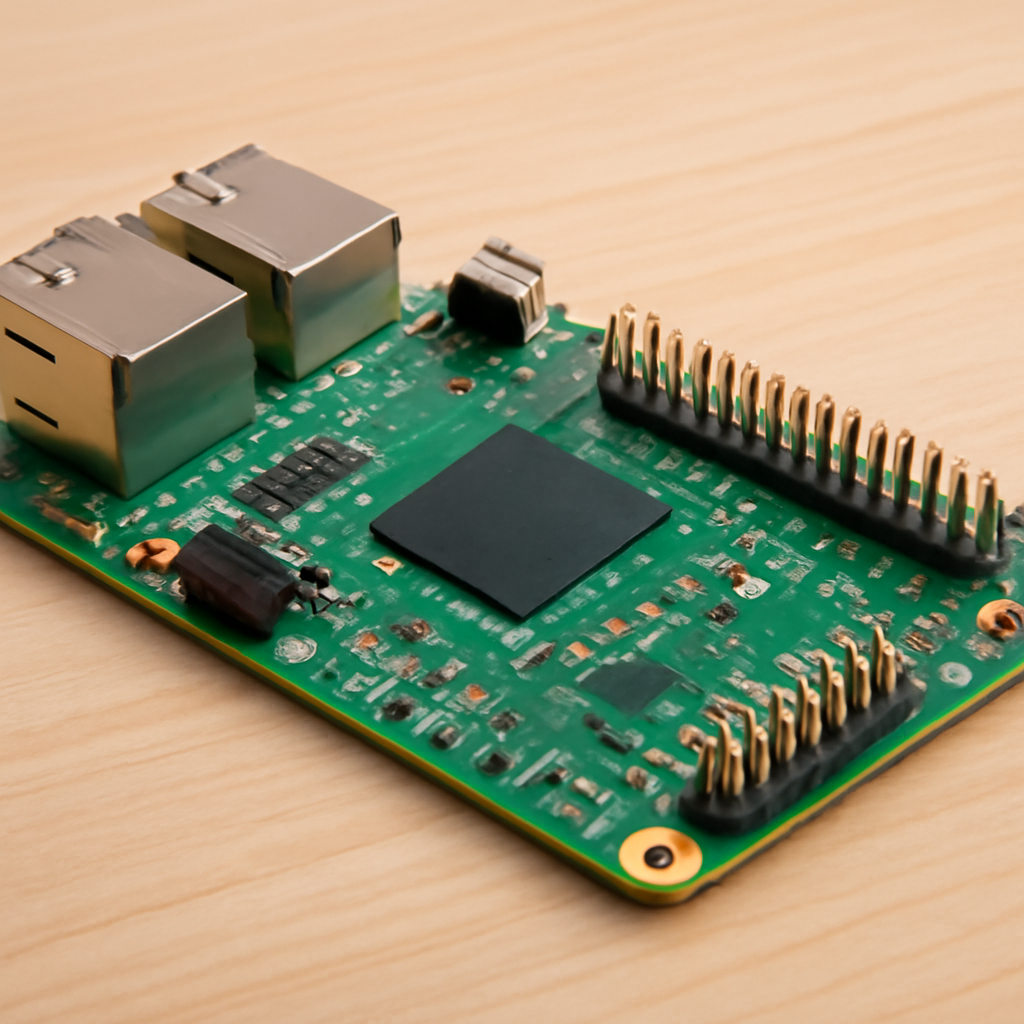 Linux-Board mit GPIO-Header
Linux-Board mit GPIO-Header
Die Integration in Captain Malus Arbeitsumgebung kann auch durch die Verknüpfung mit bestehenden Open-Source-Projekten ergänzt werden. Nutzen sich Klipper oder andere Drucker-Firmware auf Linux-Basis an, lassen sich Displays gut in Dashboards integrieren, die Statusinformationen aus dem Drucker in Echtzeit anzeigen. Klipper auf Linux-basierten DIY-Druckern: Praxisnahe Installations- und Kalibrierungsanleitung für Captain Malu
Schaltplan, Vorwiderstände und Multiplexing: Praktische Hinweise
Der zentrale Baustein jeder 7-Segment-Anzeige ist der Schaltplan. Leg fest, welcher Anschluss das gemeinsame Anode- oder Kathoden-Teil enthält und welche Segmente du gezielt ansteuern willst. Missverständnisse hier führen schnell zu Fehlanzeigen oder ungleichmäßiger Helligkeit.
Der Vorwiderstand pro Segment ist unverzichtbar, um den LED-Strom zu begrenzen. Ohne ihn läuft eine LED in Überstrom hinein, was zu Überhitzung und schneller Alterung führt. Die richtige Auswahl des Widerstandswerts hängt von der Versorgungsspannung, dem Vorwärtsspannungsabfall der LEDs und dem gewünschten Leuchtwert ab. Da diese Werte je nach LED-Typ variieren, musst du die Teiledatenblätter prüfen und den Widerstand entsprechend dimensionieren.
Multiplexing ist eine effiziente Methode, um mit wenigen Pins mehrere Ziffern zu steuern. Indem du die Ziffern sequentiell aktivierst und gleichzeitig die passenden Segmentleitungen setzt, erzeugst du den Eindruck einer durchgehenden Anzeige. Der Trick besteht darin, die Refresh-Rate so zu wählen, dass menschliche Augen kein Flimmern wahrnehmen. Übliche Zielwerte liegen jenseits von 60 Hz; in vielen DIY-Projekten wird eine Frequenz im Bereich mehrerer Hundert Hertz angestrebt.
Wichtige Design-Aspekte: Vermeide zu lange Leiterbahnen, nutze kurze Verbindungen, saubere Lötstellen und stabilisierte Netzteile. Wenn du Module wie TM1637 oder HT16K33 verwendest, orientiere dich an den Hersteller-Anleitungen hinsichtlich Pinbelegung und Initialisierung.  Schaltplan mit Vorwiderständen
Schaltplan mit Vorwiderständen
Planungshilfe für den Praxisalltag: Erstelle zuerst einen Prototyp-Schaltplan mit einer einzelnen Ziffer. Steuere die Segmente gezielt an und teste Helligkeit sowie Gleichmäßigkeit, bevor du weitere Ziffern hinzufügst. Danach kannst du Multiplexing schrittweise einführen und die Timing-Parameter testen. Wenn du HT16K33 verwendest, installiere eine passende Bibliothek und verifiziere die I2C-Kommunikation mit einem einfachen Testskript. Die neuesten 3D‑Druck‑Trends 2026: Materialien, Anwendungen und was Einsteiger jetzt wissen sollten
3D-Druck und Gehäusegestaltung für Segmentanzeigen
Der 3D-Druck bietet ideale Möglichkeiten, Segmentanzeigen in maßgeschneiderte Gehäuse einzubetten. Eine robuste Bauform schützt die Anzeige gegen Vibrationen, Staub und mechanische Belastungen – besonders in Werkstattsituationen oder mobilen Anwendungen. Beginne mit einem kompakten Grundgehäuse aus robustem Material, das die Display-Komponenten sicher umschließt. Achte auf ausreichende Belüftung und einen festen Kabel-Einlass, damit die Elektronik nicht überhitzt.
Für die Gehäusegestaltung eignen sich klare Linien und Passformen, die eine einfache Montage ermöglichen. Nutze Dichtungen oder ramponierte Kanten, damit Kabel nicht aus dem Gehäuse reißen. Die Integration in größere 3D-Druck-Projekte gelingt mit passgenauen Ausschnitten für Schrauben, Stützen oder Heatset-Einsätze. Heatset-Einsätze ermöglichen langlebige Gewinde in 3D-Druckteilen und helfen, das Display dauerhaft zu fixieren.
Die Passgenauigkeit ist zentral: Miss die Abstände zwischen dem Display-Modul, dem Treiberboard und dem Gehäuse sorgfältig, um Spielräume zu minimieren. Plane die Kabelwege so, dass sie sauber geführt sind und keine Spannungen erzeugen. Wenn du Modularität bevorzugst, baue zwei getrennte Gehäusesegmente, die sich per Clip- oder Schraubverbindung zusammenfügen lassen.  3D-gedrucktes Gehäuse mit Display-Ausschnitt
3D-gedrucktes Gehäuse mit Display-Ausschnitt
Für Captain Malu empfiehlt sich, zuerst eine einfache Gehäuseform zu drucken, dann eine zweite Version mit veränderten Ausschnitten, um die Passgenauigkeit zu testen. Nutze das Prinzip der Iteration: eine schnelle Druckversion, Passung messen, Anpassung und erneut drucken. Verlinkte Ressourcen zu 3D-Druck-Trends und Werkstofftipps helfen bei der richtigen Filamentwahl und der Oberflächenqualität. 3D-Druck-Tipps 2026
Zusätzliche Tipps zur Integration: Plane, wie die Anzeige in dein bestehendes System eingespielt wird – etwa als Statusanzeige für den Drucker oder als Zähler für einen Bauteil-Log. Denke daran, eine saubere Gehäuseoberfläche zu schaffen, damit Lichtausschnitte klar verlaufen und die Segmente deutlich lesbar bleiben. Eine klare Beschriftung der Segmente erleichtert Wartung und Erweiterung.  Innenansicht eines Gehäuses mit Leiterbahnen
Innenansicht eines Gehäuses mit Leiterbahnen
Praxisprojekte und Fehlersuche: Zähler, Timer, Anzeigen-Design
Starte mit zwei praxisnahen Projekten, die sich gut für Einsteiger eignen und dennoch solide Ergebnisse liefern. Projekt eins ist ein einfacher Zähler, der bei jedem Takt inkrementiert und eine ausgewählte Ziffernfolge anzeigt. Projekt zwei ist ein Timer, der nach einer voreingestellten Zeit einen Alarmzustand anzeigt oder den Dezimalpunkt blinkend steuert. Beide Projekte liefern klares Feedback zu Timing, Verkabelung und Logik.
Fehlerquellen in der Praxis umfassen falsch gelötete Verbindungen, vertauschte gemeinsame Anschlüsse, unzureichende Vorwiderstände oder Timing-Probleme beim Multiplexing. Prüfe zuerst die Stromversorgung und Polarität der gemeinsamen Anschlüsse. Danach kontrolliere die Verbindungen der Segmentleitungen auf Korrektheit. Ein Multimeter hilft, Durchgänge und Widerstände zu prüfen, während ein Oszilloskop Timing-Probleme in den Multiplex-Zyklen aufzeigt.
Typische Debug-Schritte in der Reihenfolge:
1) Versorgung und Masse prüfen. 2) Prüfen, dass gemeinsame Anode bzw. Kathode korrekt verbunden ist. 3) Jeden Segmentpfad auf Unterbrechungen oder kalte Lötstellen kontrollieren. 4) Treiberinitialisierung und Aktualisierung der Ziffern verifizieren. 5) Belastungstests durchführen, um Helligkeit und Kontrast stabil zu prüfen. 6) Unter Linux Logging in Bash oder Python nutzen, um Statuswerte laufend zu prüfen.
Für fortgeschrittene Anwender lässt sich das Design mit einem kleinen Open-Source-Board verbinden, das Display-Output mit Drucker-Statusinformationen anreichert. So entsteht ein praktisches Dashboard, das den Arbeitsfluss spürbar unterstützt. Klipper auf Linux-basierten DIY-Druckern: Praxisnahe Installations- und Kalibrierungsanleitung für Captain Malu
Weitere Praxisideen oder Lernpfade: eine Temperaturanzeige mit Dezimalpunkt, eine Uhr mit Sekundenanzeige und Flytext, sowie eine modulare Anzeige, die sich an verschiedene Gehäuseformen anpasst. Je modularer der Aufbau, desto leichter lassen sich Upgrades oder Ersatzteile integrieren.  Display-Dashboard mit mehreren Ziffern
Display-Dashboard mit mehreren Ziffern
Zusammenfassung: In diesen Projekten lernst du die Kernprinzipien der Segmentanzeige kennen – von Schaltung über Treiber bis zur Umsetzung in Linux-Umgebungen. Die Verlässlichkeit von TM1637 und HT16K33 hängt von der Anzahl der Ziffern, der bevorzugten Schnittstelle und dem Grad an Automatisierung ab. Das gelingt durch klare Struktur, schrittweises Vorgehen und wiederholte Tests. Wer die ersten Schritte konsequent durchführt, gewinnt schnell Sicherheit und kann Displays nahtlos in eigene Projekte integrieren.
Abschlussgedanke: Nutze deine 7-Segmentanzeige als Lernplattform, nicht nur als fertiges Anzeige-Element. Mit der richtigen Herangehensweise wird aus einem einfachen Zähler im Handumdrehen ein elegantes, zuverlässiges Display-Interface, das sich in vielen DIY-Druck- oder Elektronikprojekten sinnvoll einsetzen lässt. Für weiterführende Einblicke in verwandte Trends und praxisnahe Tipps kannst du zudem die empfohlenen Ressourcen nutzen.  Endmontage eines fertigen Segment-Displays im Gehäuse
Endmontage eines fertigen Segment-Displays im Gehäuse



