Warum stille Schrittmotor-Treiber heute unverzichtbar sind
Willkommen in einer Welt, in der Lautstärke nicht mehr das Maß für Leistung ist. Als Bastlerin bzw. Bastler mit Linux-Umgebungen kennt Ihr das Problem: laute Schrittmotoren vibrieren nicht nur hörbar, sie übertragen auch mechanische Belastung an Rahmen, Führungen und Gehäuse. Silent Stepper Treiber bieten hier eine pragmatische Lösung, Geräusch- und Vibrationspegel zu senken – ohne an Präzision zu verlieren. In gemeinschaftlichen Räumen und Campus-Laboren bedeuten leisere Systeme weniger Stress, bessere Arbeitsbedingungen und oft auch eine bessere Druckqualität durch stabilere Bewegungen. Dieser Beitrag fokussiert konkrete Einbau- und Konfigurationsschritte für Silent Stepper Treiber in Klipper/Marlin, ergänzt durch Wärme-, Kosten- und Messwert-Analysen – praxisnah in offenen Werkstätten und Lernumgebungen. Silent Stepper Treiber senken Geräusch- und Vibrationspegel bei gleichzeitiger Präzisionssteuerung. Für deutschsprachige Bastlerinnen und Bastler mit Linux-Umgebungen bietet dieser Beitrag praxisnahe Anleitungen, Wärme-Management-Tipps und eine Kosten-Nutzen-Analyse – zeitgemäß in offenen Werkstätten und Lernumgebungen. Klipper Marlin.
In der Praxis bedeutet das: Wir arbeiten uns Schritt für Schritt durch Modelle der Treiberfamilien, prüfen Steckverbindungen, Kühlung und die Art der Ansteuerung (Step/Dir oder SPI/UART). Die hier zusammengetragenen Informationen beziehen sich auf verbreitete Treiber wie TMC2208/2209 sowie TMC5160 und deren Einsatz in typischen 3D-Druck- und CNC-Setups. Die Unterschiede zwischen SPI/UART- und STEP/DIR-Schnittstellen beeinflussen, wie wir Kabel legen, Currents setzen und wie wir StealthChop aktivieren, um Störungen zu minimieren. Als Grundlage dienen Theorien zu Mikroschritten, StealthChop und Co. sowie praxisnahe Beispiele aus Foren und technischen Ressourcen. SilentStepStick Vergleich sowie eine tiefergehende Einführung zu den Vorteilen stiller Treiber finden sich in Vorteile Silent Stepper Treiber verstehen. Zusätzlich bietet die Arduino-Community Einblicke in die Wahrscheinlichkeit von Stillheit je nach Treiber-Generation. Arduino Forum Diskussion.
Wie Silent Stepper Treiber funktionieren: Mikroschritte, StealthChop und Co.
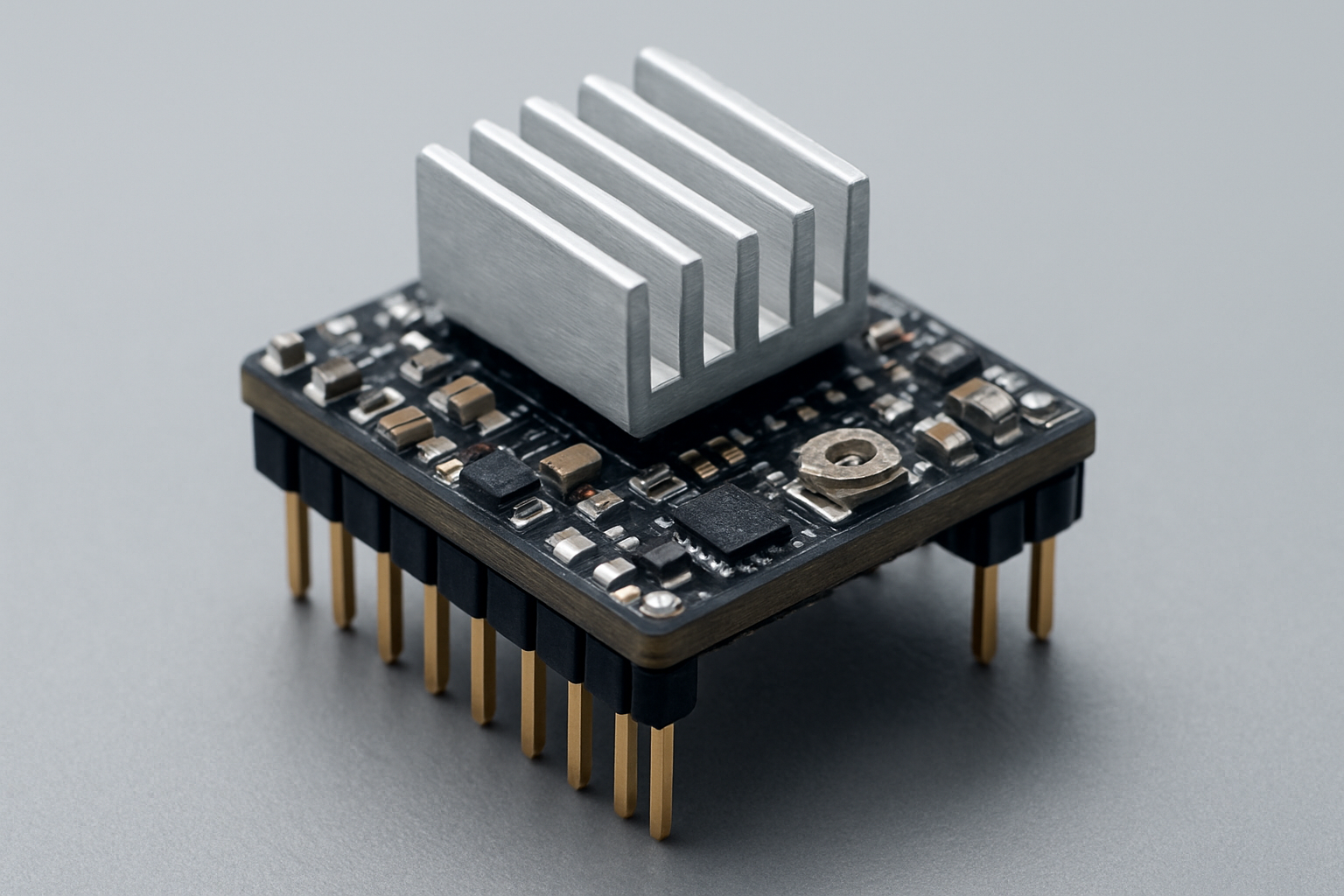
Der zentrale Reiz stiller Treiber liegt in der Art, wie sie Spulenströme steuern. Mikroschritte bedeuten, dass der Rotor in vielen Zwischenpositionen gehalten wird, was zu ruhigeren Bewegungen führt. Ein ganz wichtiger Bestandteil ist StealthChop – eine moderne Chopper-Strategie, die Muster der Stromzufuhr optimiert, um Ripple und Leck-Effekte zu minimieren. Dadurch sinkt die Geräuschentwicklung, insbesondere bei langsamen Geschwindigkeiten, erheblich. Die Theorie dahinter ist, dass weniger current ripple zu weniger Vibration führt, was wiederum zu einer stabileren Regelung von Position und Geschwindigkeit beiträgt. Für Einsteiger ist dies oft der Hauptgrund, warum stille Treiber gegenüber Standard-Treibern bevorzugt werden. Die konkrete Umsetzung variiert je nach Treiber-Generation (z. B. TMC2208/2209 vs. 5160), aber das Grundprinzip bleibt: fein regulierte Stromzufuhr mindert Geräusch- und Vibrationspegel, ohne die Präzision zu gefährden. Understanding Silent Stepper Driver Benefits.
 Diagramm StealthChop vs. PWM-Modulation
Diagramm StealthChop vs. PWM-Modulation
Vergleich relevanter Treiberfamilien: TMC2208/2209 vs. TMC5160 – Vor- und Nachteile
Im Amplifier-Universum der stillen Treiber finden sich mehrere Familien, die sich in Aufbau, Interface und Leistungsparametern unterscheiden. Die gängigsten Kandidaten in vielen 3D-Druck- und CNC-Setups sind TMC2208/2209 und der leistungsstärkere TMC5160. Laut dem SilentStepStick Vergleich decken diese Bausteine unterschiedliche Betriebsarten ab, darunter Step/Dir-Interface (klassisch) und SPI/UART-Steuerungen, die eine komfortable Software-Anbindung ermöglichen. Die Wahl hängt von Eurer Hardware, dem Board-Layout und der gewünschten Kühlung ab. Typische Vor- und Nachteile zusammengefasst:
- TMC2208/TMC2209: Weit verbreitet, kompakte Lösung, oft SPI- oder UART-Modus möglich; einfache Integration in Klipper/Marlin; gute Balance aus Lautstärke und Kosten. Die Unterschiede innerhalb der 2208/2209-Familie betreffen Spannungs- und Stromsensorik sowie die Unterstützung von StealthChop in verschiedenen Varianten. Vorteil ist die geringere Baugröße und geringere Hitzeentwicklung; Nachteile können bei sehr hohen Lasten auftreten, wo andere Treiber mehr Reserve bieten. SilentStepStick Vergleich
- TMC5160: Höhere Leistungsreserve, oft mit besserer StallGuard- und Sensorless-Feedback-Option; potenziell stärkere Kühlung nötig, da der Treiber mehr Leistung abgibt. In manchen Setups kann der Aufbau komplexer sein, und die Verkabelung (insbesondere SPI) erfordert sorgfältige Planung. SilentStepStick Vergleich
Praktisch bedeutet das: Für einfache bis mittlere Druck- und CNC-Anforderungen reichen oft TMC2208/2209 aus, während anspruchsvolle oder schwere Aufgaben (z. B. dicke Materialien oder schneller Vorwärts-/Rückwärtsgang) eher von TMC5160 profitieren können. Die Entscheidung hängt auch davon ab, ob ihr eine Step/Dir-Verbindung bevorzugt oder eine SPI/UART-Verknüpfung – letzteres erleichtert Feinabstimmung über Software, erfordert jedoch passende Board-Unterstützung. Der Vergleichszweig des Teams SilentStepStick bietet weiterführende Details zu Pinouts, Versorgung und Schutzmechanismen (Kühlkörper, Protektor). SilentStepStick Vergleich.
 Vergleichstabelle der Treiberfamilien
Vergleichstabelle der Treiberfamilien
Praxisvorteile im 3D-Druck, CNC und Labor-Setup
In der Praxis bedeuten stille Treiber konkrete Verbesserungen in der täglichen Arbeit. Hier die wichtigsten Vorteile, die sich in 3D-Druck- und CNC-Setups zeigen:
- Weniger Geräusche, weniger Stress: StealthChop-gestützte Ansteuerung sorgt für deutlich leisere Bewegungen, besonders bei langsamen Achsenläufen – in gemeinschaftlich genutzten Räumen deutlich angenehmer. Die gleichmäßigere Stromzufuhr reduziert Schwingungen, was zu ruhigeren Start-/Stopp-Vorgängen führt. Understanding Silent Stepper Driver Benefits
- Präzision bleibt erhalten: Mikroschritte liefern sanftere Bewegungen, was Wiederholgenauigkeit und Oberflächenqualität verbessert. Das Konzept der Mikroschritte hängt eng mit gleichmäßigen Rotorpositionen zusammen – weniger Sprünge bedeuten mehr Konsistenz in Druck- oder Fräsvorgängen. Understanding Silent Stepper Driver Benefits
- Vereinfachte Upgrades in vorhandenen Setups: Viele Boards unterstützen TMC-Treiber im Austauschformat. Step/Dir- oder SPI-Schnittstellen lassen sich zügig in bestehende Klipper-/Marlin-Setups integrieren, sofern Pinsbelegung und UART/DIFF-Modus berücksichtigt werden. Die praxisnahe Comparision von SilentStepStick zeigt, dass sich die Treiberfamilien gut in vorhandene Systeme integrieren lassen. SilentStepStick Vergleich
- Weniger Verschleiß an Mechanik: Gleichmäßige Ansteuerung reduziert plötzliche Kraftwechsel, die sich an Lagern, Führungen und Antrieben niederschlagen. Das trägt zu geringeren Wartungskosten und einer ruhigeren Gesamtdynamik bei.
Für Laborumgebungen, Open-Source-Lernumgebungen und Maker-Sets ist das eine überzeugende Kombination: Ruhe, Transparenz und Nachvollziehbarkeit in der Steuerung, verbunden mit der Flexibilität offener Systeme. Silent Stepper Treiber senken Geräusch- und Vibrationspegel bei gleichzeitiger Präzisionssteuerung. Detaillierte Praxisfälle und Diskussionen erfolgen oft in den verlinkten Ressourcen.
 ruhiger Drucker im Laborumfeld
ruhiger Drucker im Laborumfeld
Installation, Konfiguration und Troubleshooting in Linux-Umgebungen
Der Kernprozess lässt sich in zwei Phasen gliedern: Hardware-Installation und Software-Konfiguration. Als Linux-Admin oder Hobby-Bastler seid Ihr es gewohnt, zuerst die physische Komponente zu sichern und anschließend die Software-Schicht sauber zu konfigurieren. Die folgenden Schritte sind praxisnah und zielen darauf ab, konkrete Umsetzungswege aufzuzeigen. Die Implementierung variiert je nach Controller-Board (z. B. typischer 32-Bit-Controller für Klipper/Marlin) und dem Treiber-Interface (Step/Dir vs. SPI/UART).
- Schritt 1: Auswahl des Treibers – Überlegt, welcher Treiber zu Eurem Board passt (TMC2208/2209 oder TMC5160). Berücksichtigt Größe, Wärmeentwicklung und verfügbare Pins. Der SilentStepStick-Vergleich bietet Orientierung, welche Modelle typischerweise in welchen Setups eingesetzt werden. SilentStepStick Vergleich
- Schritt 2: Physischer Einbau – Treiber in den Controller-Sockel einsetzen oder SilentStepStick Modules ergänzend installieren. Achtet auf korrekte Ausrichtung, Schutzkappen, Kühlkörper und ggf. Heatsink. Kühlung ist oft wichtiger, als vermutet, da Treiber auch bei niedrigen Lasten Wärme erzeugen können. Siehe Hinweise zum Kühlkörper und Schutzmechanismen im Vergleichs- und Produktkontext. SilentStepStick Vergleich
- Schritt 3: Verkabelung – Step/Dir-Verbindung oder SPI/UART-Verbindung je nach Treibermodell. Planen Sie Ihre Kabelwege sorgfältig, vermeiden Sie Kreuzungen mit Spannungsversorgungen und sichern Sie klare Trennung von Signalleitungen. Die Verbindungsoptionen (Step/Dir vs. SPI) sind im Vergleich hervorgehoben. SilentStepStick Vergleich
- Schritt 4: Currents einstellen – Passen Sie die Treiber-Current-Limits an Ihre Motoren an. Zu viel Strom führt zu Überhitzung, zu wenig zu Stocken. Die Werte hängen von Motor-Typ, Versorgungsspannung und Achslast ab; Starten Sie mit sanften Werten und testen Sie langsam. In der Praxis ist dieser Schritt entscheidend für Stabilität und Verlässlichkeit.
- Schritt 5: Software-Konfiguration – In Klipper/Marlin stellen Sie die Treiber entsprechend der gewählten Schnittstelle ein. Aktivieren Sie StealthChop bzw. die mikroskopische Glättung der Ströme über die Treibereinstellungen. Die konkrete Umsetzung variiert je nach Firmware, aber das Grundprinzip – weniger Streuung der Stromzufuhr – bleibt gleich. Die Hinweise zu StealthChop und Mikroschritten finden sich in der oben genannten Fachliteratur. Understanding Silent Stepper Driver Benefits
- Schritt 6: Tests und Troubleshooting – Sanftstart- und Endstop-Tests durchführen, Temperaturen mit Linux-Tools oder Sensoren prüfen und die Reaktionen der Achsen beobachten. Wenn Motoren laufen, aber Geräusche oder Vibrationen persistieren, Currents, Luftzirkulation und Kabelverlegung prüfen. Sensorless-Optionen (StallGuard) können helfen, sind aber von Board/Firmware abhängen. Für eine tiefergehende Diskussion rund um stille Treiber empfiehlt sich die Arduino-Community. Arduino Forum Diskussion
Tipps für Linux-Umgebungen: Nutzt Terminal-basierte Editor-Tools, erstellt Backups, dokumentiert Änderungen. In Klipper-/Marlin-Setups genügt oft das Anpassen von current, microsteps oder der Treiber-Schnittstelle in der Config-Datei. Stellt sicher, dass Pin-Belegung stimmt und UART-/SPI-Verbindungen stabil sind. Die Konfigurationsoptionen variieren je nach Firmware-Version – konsultiert die offizielle Dokumentation Eurer Plattform, ergänzt durch Community-Beiträge. Klipper Marlin.
Wärme, Stromverbrauch und Kühlung: Warum Kühlung oft wichtiger ist als vermutet
Hitze ist einer der größten Feinde stiller Treiber. Ein Treiber, der sich unter Last oder bei unzureichender Kühlung erhitzt, leidet oft unter Leistungseinbrüchen, ungleichmäßigen Motion-Profilen und im Extremfall Ausfällen. Daher ist Kühlung oft wichtiger als die pure Leistungsabgabe. Die Praxis zeigt, dass Kühlkörper, Heatsinks oder aktive Kühlung (Lüfter) zu stabileren Bewegungen beitragen, weil sie Temperaturanstiege senken und Currents stabilisieren. Wenn Upgrades erfolgen, sorgt für effektive Luftzirkulation rund um die Treiber, montiert Kühlkörper und prüft Temperaturen während Tests. Die Hardware-Aspekte (Kühlkörper, Schutzmechanismen) werden im SilentStepStick-Übersichts- und Vergleichsbereich diskutiert. SilentStepStick Vergleich – dort finden sich Hinweise zu Kühlung und Schutz der Treiberkomponenten. Understanding Silent Stepper Driver Benefits.
 Wärmeregelungskältelemente an Treibern
Wärmeregelungskältelemente an Treibern
Kosten-Nutzen-Analyse und Fallstricke beim Upgrade
Wie bei vielen Upgrades in offenen Systemen gilt auch hier: Der Mehrwert besteht nicht nur in leiseren Betriebsparametern, sondern auch in verbesserter Stabilität und potenziell besseren Druck-/Bearbeitungsqualitäten. Die Investition in Silent Stepper Treiber oder SilentStepStick-Boards bedeutet in der Praxis höhere Beschaffungskosten, doch der Nutzen zeigt sich in reduzierter Geräusch- und Vibrationsentwicklung sowie möglicherweise besseren Führungsqualitäten. Es empfiehlt sich, schrittweise vorzugehen: Beginnt mit einem oder zwei Achsen, testet die Integration in Klipper/Marlin, dokumentiert Ergebnisse und erweitert das Upgrade systematisch. Die Fachquellen betonen die Vorteile von StealthChop und Mikroschritten; Kosten-Impacts entstehen vor allem durch Hardware-Verfügbarkeit. Understanding Silent Stepper Driver Benefits und der SilentStepStick-Vergleich SilentStepStick Vergleich helfen bei der Orientierung, welche Treiberfamilie für Budget und Anwendung geeignet ist.
Häufige Fallstricke liegen in der falschen Pin- oder Kommunikationsart (Step/Dir vs. SPI/UART) oder in falsch gesetzten Currents, was zu Überhitzung oder inkonsistenter Leistung führt. Vergewissert Euch, dass Euer Controller-Board die gewünschte Schnittstelle unterstützt und dass Firmware-Optionen wie StealthChop aktivierbar sind. Erfahrungen aus Foren zeigen: Planung, Tests und schrittweises Vorgehen erhöhen die Erfolgsrate deutlich. Arduino Forum Diskussion bietet ergänzende Einblicke in Geräte-Kompatibilität und Nutzungs-Erfahrungen.
Zusammenfassend lässt sich sagen: Der Nutzen stiller Treiber liegt weniger in spektakulären Leistungssteigerungen als in der deutlich besseren Lebensqualität der Laufzeit, in der feinen Steuerung bei Präzisionsarbeiten und in einem angenehmeren Arbeitsumfeld – besonders in Gemeinschaftsräumen. Captain Malu hält fest: Der Weg zum leisen, präzisen Druck- oder Fräsvorgang ist eine Kombination aus passender Treiberwahl, sauberer Kühlung, sinnvoller Verkabelung und durchdachter Software-Konfiguration.



